
Abstract
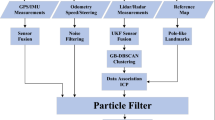
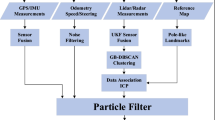
In this paper we tackle the development of a robotic-car with hardware control, lane detection, mapping, localization and path planning capabilities. We aim for a completely independent, reliable and robust system that can traverse a single lane track bordered by white lines on an optimal path. To detect the track boundaries, we implement two different approaches. A RANSAC approach, which approximates the lines by random sampling of splines, and a polyline approach, which applies primitive image processing in combination with a road model. To map the environment, odometry and vision-based information is fused by a particle filter based Simultaneous Localization and Mapping system. The map is afterwards used in conjunction with Adaptive Monte Carlo Localization. For path planning, a one step continuous-curvature approach based on sensor or maps data is used. To offer more detailed information about the environment, we introduce a generic map analysis system. It is employed to evaluate the efficiency of certain paths on the track.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Aly, M.: Real Time Detection of Lane Markers in Urban Streets. In: IEEE Intelligent Vehicles Symposium (June 2008)
Bertozzi, M., Broggi, A.: Real-time lane and obstacle detection on the gold system. In: Proceedings of the IEEE Intelligent Vehicles Symposium, September 19-20, pp. 213–218. IEEE Press (1996)
Bertozzi, M., Broggi, A.: Gold: a parallel real-time stereo vision system for generic obstacle and lane detection. IEEE Transactions on Image Processing 7(1), 62–81 (1998)
Bresenham, J.E.: Algorithm for computer control of a digital plotter. IBM Syst. J. 4(1), 25–30 (1965)
De Boor, C.: A practical guide to splines. Appl. Math. Sci. (1978)
Doucet, A., Freitas, N., Murphy, K., Russell, S.: Raoblackwellised particle filtering for dynamic bayesian networks. In: The 16th Annual Conference on Uncertainty in Artificial Intelligence, pp. 176–183. Morgan Kaufmann Publishers (2000)
Forsyth, D.A., Ponce, J.: Computer Vision: A Modern Approach. Prentice Hall Professional Technical Reference (2002)
Fox, D.: Adapting the sample size in particle filters through kld-sampling. International Journal of Robotics Research 22 (2003)
Lavalle, S.M.: Rapidly-exploring random trees: A new tool for path planning. Technical report (1998)
Murphy, K.: Bayesian map learning in dynamic environments. In: Neural Info. Proc. Systems (NIPS), pp. 1015–1021. MIT Press (2000)
Nixon, M., Aguado, A.S.: Feature Extraction & Image Processing, 2nd edn. Academic Press (2008)
Norris, W.: Modern steam road wagons. Longmans, Green, and co. (1906)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Claes, D., Fossel, J., Broecker, B., Hennes, D., Tuyls, K. (2013). Development of an Autonomous RC-car. In: Lee, J., Lee, M.C., Liu, H., Ryu, JH. (eds) Intelligent Robotics and Applications. ICIRA 2013. Lecture Notes in Computer Science(), vol 8103. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-40849-6_10
Download citation
DOI: https://doi.org/10.1007/978-3-642-40849-6_10
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-40848-9
Online ISBN: 978-3-642-40849-6
eBook Packages: Computer ScienceComputer Science (R0)