
Abstract
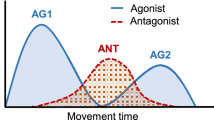
We have to choose muscle activation pairs of agonist and antagonist muscles from a variety of combinations to achieve a movement. Even though there is a redundancy problem, we could immediately solve the problem and generate movements with a characteristic muscle activation pattern that the muscle pairs burst alternatively as the biphasic or triphasic shape. In this paper, in order to investigate requirements that derive the muscle activation pattern, we carried out numerical simulations of arm movement using a musculoskeletal arm model and an approximately optimal feedback control law with changing the cost structure. As a result, the muscle activation pattern could be reproduced by the simulation with a cost form composed by four terms, i.e., position, velocity, force and energy consumption. Thus, the muscle activations may correspond to cost terms. Furthermore, we suggest that the brain also regulate the force as well as the spatial accuracy and efficiency in the absence of any force interaction.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Darainy, M., Ostry, D.J.: Muscle cocontraction following dynamics learning. Exp. Brain Res. 190, 153–163 (2008)
Hallett, M., Shahani, B.T., Young, R.R.: EMG analysis of stereotyped voluntary movements in man. J. Neurol. Neurosurg. Psychiatry. 38, 1154–1162 (1975)
Ueyama, Y., Miyashita, E.: Devising a Robotic Arm Manipulandum for Normal and Altered Reaching Movements to Investigate Brain Mechanisms of Motor Control. Instrum. Sci. Technol. 41, 251–273 (2013)
Ueyama, Y., Miyashita, E.: Signal-Dependent Noise Induces Muscle Co-Contraction to Achieve Required Movement Accuracy: A Simulation Study with an Optimal Control. Curr. Bioinform. 8, 16–24 (2013)
Mitrovic, D., Klanke, S., Osu, R., Kawato, M., Vijayakumar, S.: A Computational Model of Limb Impedance Control Based on Principles of Internal Model Uncertainty. PLoS One 5, e13601 (2010)
Osu, R., Kamimura, N., Iwasaki, H., Nakano, E., Harris, C.M., Wada, Y., Kawato, M.: Optimal impedance control for task achievement in the presence of signal-dependent noise. J. Neurophysiol. 92, 1199–1215 (2004)
Todorov, E., Jordan, M.I.: Optimal feedback control as a theory of motor coordination. Nat. Neurosci. 5, 1226–1235 (2002)
Ueyama, Y., Miyashita, E.: Optimal Feedback Control for Predicting Dynamic Stiffness during Arm Movement. IEEE Trans. Ind. Electron. 61 (in press, 2014)
Pruszynski, J.A., Kurtzer, I., Nashed, J.Y., Omrani, M., Brouwer, B., Scott, S.H.: Primary motor cortex underlies multi-joint integration for fast feedback control. Nature 478, 387–390 (2011)
Li, W., Todorov, E.: Iterative linearization methods for approximately optimal control and estimation of non-linear stochastic system. Int. J. Contr. 80, 1439–1453 (2007)
Nakano, E., Imamizu, H., Osu, R., Uno, Y., Gomi, H., Yoshioka, T., Kawato, M.: Quantitative examinations of internal representations for arm trajectory planning: minimum commanded torque change model. J. Neurophysiol. 81, 2140–2155 (1999)
Harris, C.M., Wolpert, D.M.: Signal-dependent noise determines motor planning. Nature 394, 780–784 (1998)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ueyama, Y. (2013). Effects of Cost Structure in Optimal Control on Biological Arm Movement: A Simulation Study. In: Lee, M., Hirose, A., Hou, ZG., Kil, R.M. (eds) Neural Information Processing. ICONIP 2013. Lecture Notes in Computer Science, vol 8226. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-42054-2_31
Download citation
DOI: https://doi.org/10.1007/978-3-642-42054-2_31
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-42053-5
Online ISBN: 978-3-642-42054-2
eBook Packages: Computer ScienceComputer Science (R0)