
Abstract
Platoon vehicles coordination is an important topic at Intelligent Transportation Systems these days. For coordinating two or more vehicles, it is needed both a communication method between them, and an environment sensing strategy enabling the triangulation and correction, when needed, of each vehicle relative position within the desired platoon.
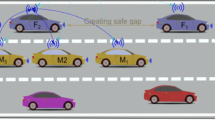
In this research we present a new strategy to keep a group of vehicles in a fixed platoon, that may complement classic approaches. Usually, in a platoon, every follower vehicle try to keep a distance to the vehicle right ahead. That lateral and longitudinal control is kept considering the sensed distances by using laser, radar or vision.
In the present paper we want to propose a new concept that consists on sharing the leader’s acceleration signal all across the whole vehicle platoon. In a few words, all the followers try to implement the leader’s sensed and transmitted acceleration. Theoretically, two solids experiencing the same accelerations will reproduce identical trajectories while keeping the initial relative distances, if they start from the same initial non-zero constant speed.
In this paper we present this new concept, we list what are some of the technological challenges to be addressed before its implementation, and we finally share some initial simulation results.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Bertozzi, M., Bombini, L., Broggi, A., Buzzoni, M., Cardarelli, E., Cattani, S., Cerri, P., Coati, A., Debattisti, S., Falzoni, A., Fedriga, R., Felisa, M., Gatti, L., Giacomazzo, A., Grisleri, P., Laghi, M., Mazzei, L., Medici, P., Panciroli, M., Porta, P., Zani, P., Versari, P.: Viac: An out of ordinary experiment. In: 2011 IEEE Intelligent Vehicles Symposium (IV), pp. 175 –180 (June 2011)
Naranjo, J., Gonzalez, C., Garcia, R., de Pedro, T.: Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver. IEEE Transactions on Intelligent Transportation Systems 9(3), 438–450 (2008)
van Nunen, E., Kwakkernaat, M.R.J.A.E., Ploeg, J., Netten, B.D.: Cooperative competition for future mobility. IEEE Transactions on Intelligent Transportation Systems 13(3), 1018–1025 (2012)
Rajamani, R., Tan, H.S., Law, B.K., Zhang, W.B.: Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons. IEEE Transactions on Control Systems Technology 8(4), 695–708 (2000)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Sánchez-Medina, J.J., Broggi, A., Galan-Moreno, M.J., Rubio-Royo, E. (2013). Acceleration Signal Based Linear Formation Driving Model: Algorithmic Description and Simulation Results. In: Moreno-Díaz, R., Pichler, F., Quesada-Arencibia, A. (eds) Computer Aided Systems Theory - EUROCAST 2013. EUROCAST 2013. Lecture Notes in Computer Science, vol 8112. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-53862-9_7
Download citation
DOI: https://doi.org/10.1007/978-3-642-53862-9_7
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-53861-2
Online ISBN: 978-3-642-53862-9
eBook Packages: Computer ScienceComputer Science (R0)