
Abstract
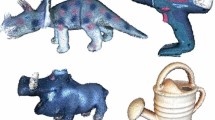
In this contribution we focus on calibration and 3D surface modeling from uncalibrated images. A large number of images from a scene is collected with a hand-held camera by simply waving the camera around the objects to be modeled. The images need not be taken in sequential order, thus either video streams or sets of still images may be processed. Since images are taken from all possible viewpoints and directions, we are effectively sampling the viewing sphere around the objects.
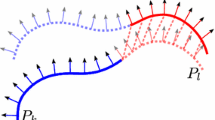
Viewpoint calibration is obtained with a structure-from-motion approach that tracks salient image points over multiple images. The calibration exploits the topology of the viewpoint distribution over the viewing sphere and builds a viewpoint mesh that connects all nearby viewpoints, resulting in a robust multi-image calibration. For each viewpoint a depth map is estimated that considers all corresponding image matches of nearby viewpoints. All depth maps are fused to generate a viewpoint- independent 3D surface representation based on a volumetric voting scheme. A voxel space is built into which the depth estimates from all the viewpoints are projected, together with their estimation uncertainty. Integration over all depth estimates determines a probability density distribution of the estimated scene surface. The approach was verified on long image sequences obtained with a hand-held video camera.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
P. Beardsley, P. Torr and A. Zisserman: 3D Model Acquisition from Extended Image Sequences. ECGV 96, LNCS 1064, vol.2, pp.683–695.Springer 1996.
L.Falkenhagen: Hierarchical Block-Based Disparity Estimation Considering Neighborhood Constraints. Intern. Workshop on SNHC and 3D Imaging, Rhodes, Greece, Sept. 1997.
O. Faugeras: What can be seen in three dimensions with an uncalibrated stereo rig. Proc. ECCV’92, pp.563–578.
O. Faugeras, Q.-T. Luong and S. Maybank: Camera self-calibration - Theory and experiments. Proc. ECCV’92, pp.321–334.
S. Gortler, R.GrzeszczukR, Szeliski M. F.Cohen: The LumigraphProceedings SIGGRAPH’96, pp 43–54, ACM Press, New York, 1996.
R. Hartley: Estimation of relative camera positions for uncalibrated cameras. ECCV’92, pp.579–587.
B. Heigl, R. Koch, M. Pollefeys, J. Denzler: Plenoptic Modeling and Rendering from Image Sequences taken by a Hand-Held Camera. Proceedings DAGM’99, Bonn, Sept. 1999.
R. Koch, M. Pollefeys, and L. Van Gool: Multi Viewpoint Stereo from Uncalibrated Video Sequences. Proc. ECCV’98, Freiburg, June 1998.
R. Koch, B. Heigl, M. Pollefeys, L. Van Gool, H. Niemann: A Geometric Approach to Lightfield Calibration. Proceedings CAIP’99, Ljubljana, Slovenia, Sept. 1999.
R. Koch, M. Pollefeys, B. Heigl, L. Van Gool, H. Niemann: Calibration of Hand¬held Camera Sequences for Plenoptic Modeling. Proc. of ICCV’99, Korfu, Greece, Sept. 1999.
M. Pollefeys, R. Koch and L. Van Gool: Self-Calibration and Metric Reconstruction in spite of Varying and Unknown Internal Camera Parameters. Proc. ICCV’98, Bombay, India, Jan. 1998.
M. Pollefeys, R. Koch, M. Vergauwen and L. Van Gool: Metric 3D Surface Re¬construction from Uncalibrated Image Sequences. In: 3D Structure from Multiple Images of Large Scale Environments. LNCS Series Vol. 1506, pp. 139–154. Springer- Verlag, 1998.
M. Pollefeys: Self-Calibration and Metric 3D Reconstruction from Uncalibrated Image Sequences. Ph.D. Thesis, K.U.Leuven, May 1999.
P.H.S. Torr: Motion Segmentation and Outlier Detection. PhD thesis, University of Oxford, UK, 1995.
B. Triggs: The Absolute Quadric. Proc. CVPR’97.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1999 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Koch, R., Pollefeys, M., Van Gool, L. (1999). Robust Calibration and 3D Geometric Modeling from Large Collections of Uncalibrated Images. In: Förstner, W., Buhmann, J.M., Faber, A., Faber, P. (eds) Mustererkennung 1999. Informatik aktuell. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-60243-6_48
Download citation
DOI: https://doi.org/10.1007/978-3-642-60243-6_48
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-66381-2
Online ISBN: 978-3-642-60243-6
eBook Packages: Springer Book Archive