
Abstract
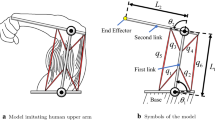
This paper studies the feedforward position control induced by the redundancy in a non-pulley-musculoskeletal system. Targeting a planar two-link musculoskeletal system with six muscles as a case study, the motion convergence depending on the muscular arrangement is examined. The results indicate that the motion convergence is extremely sensitive to the muscular arrangement and that adding small offsets for the points of muscle connection can remarkably improve the positioning performance.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Mizuuchi I, Tajima R, Yoshikai T, Sato D, Nagashima K, Inaba M, Kuniyoshi Y, Inoue H (2002) The design and control of the flexible spine of a fully tendon-driven humanoid “Kenta”. In: Proceedings of the IEEE/RSJ international conference intelligent robots and systems, vol 3. pp 2527–2532
Mizuuchi I, Nakanishi Y, Sodeyama Y, Namiki Y, Nishino T, Muramatsu N, Urata J, Hongo K, Yoshikai T, Inaba M (2007) An advanced musculoskeletal humanoid Kojiro. In: Proceedings of the 7th IEEE-RAS international conference on humanoid robots, pp 294–299
Feldman AG (1986) Once more on the equilibrium point hypothesis (lambda model) for motor control. J Motor Behav 18(1):17–54
Hogan N (1984) An organizing principle for a class of voluntary movements. J. Neurosci 4(11):2745–2754
Kawato M, Furukawa K, Suzuki R (1982) A hierarchical neural-network model for control and learning of voluntary movement. Biol Cybern 57:169–185
Arimoto S, Sekimoto M (2006) Human-like movements of robotic arms with redundant DOFs: virtual spring-damper hypothesis to tackle the Bernstein problem. In: Proceedings of the IEEE international conference on robotics and automation, pp 1860–1866
Kino H, Yahiro T, Taniguchi S, Tahara K (2009) Sensorless position control using feedforward internal force for completely restrained parallel-wire driven systems. IEEE Trans Robotics 25(2):467–474
Kino H, Yahiro T, Takemura F, Morizono T (2007) Robust PD control using adaptive compensation for completely restrained parallel-wire driven robots: translational systems using the minimum number of wires under zero-gravity condition. IEEE Trans Robotics 23(4):803–812
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this paper
Cite this paper
Kino, H., Kikuchi, S., Matsutani, Y., Tahara, K. (2013). Sensibility to Muscular Arrangement of Feedforward Position Control for Non-Pulley-Musculoskeletal System. In: Park, J.J., Barolli, L., Xhafa, F., Jeong, H.Y. (eds) Information Technology Convergence. Lecture Notes in Electrical Engineering, vol 253. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6996-0_86
Download citation
DOI: https://doi.org/10.1007/978-94-007-6996-0_86
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6995-3
Online ISBN: 978-94-007-6996-0
eBook Packages: EngineeringEngineering (R0)