
Abstract
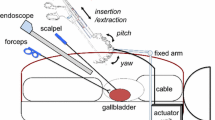
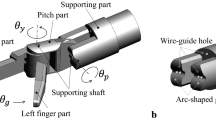
Transluminal endoscopic surgery has been widely used clinically for minimally invasive surgery (MIS). However, the size and dexterity of manipulators limit the development of this kind of surgical robot. To address this issue, we proposed a compact robotic wrist based on flexible parallel mechanisms with 4 degrees of freedom (DOFs), which is capable of dexterous manipulation in narrow cavity. The robotic wrist has an outer diameter of 4.5 mm with a 2.1mm central tool channel. The kinematic model of the flexible parallel mechanism is established. The dexterity and coordination of the robotic wrist are demonstrated in terms of motion control in narrow and complex cavity, and pepper seed grasping.
This work was supported by the National Key Research and Development Program of China 2022YFB4703000, and the National Natural Science Foundation of China 62003045, and the Beijing Institute of Technology Research Fund Program for Young Scholars.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Alimoglu, O., et al.: Robot-assisted laparoscopic (RAL) procedures in general surgery. Int. J. Med. Robot. Comput. Assist. Surg. 12(3), 427–430 (2016)
Chen, Y., et al.: The SHURUI system: a modular continuum surgical robotic platform for multiport, hybrid-port, and single-port procedures. IEEE/ASME Trans. Mechatron. 27(5), 3186–3197 (2021)
Schoeggl, A., Maier, H., Saringer, W., Reddy, M., Matula, C.: Outcome after chronic sciatica as the only reason for lumbar microdiscectomy. Clin. Spine Surg. 15(5), 415–419 (2002)
Li, C., Gu, X., Xiao, X., Lim, C.M., Ren, H.: A robotic system with multichannel flexible parallel manipulators for single port access surgery. IEEE Trans. Industr. Inf. 15(3), 1678–1687 (2018)
Chen, Y., Zhang, S., Wu, Z., Yang, B., Luo, Q., Xu, K.: Review of surgical robotic systems for keyhole and endoscopic procedures: state of the art and perspectives. Front. Med. 14, 382–403 (2020)
Khandge, A.V., Sharma, S.B., Kim, J.S.: The evolution of transforaminal endoscopic spine surgery. World Neurosurg. 145, 643–656 (2021)
Li, C., et al.: A miniature manipulator with variable stiffness towards minimally invasive transluminal endoscopic surgery. IEEE Robot. Autom. Lett. 6(3), 5541–5548 (2021)
Li, C., Gu, X., Xiao, X., Lim, C.M., Ren, H.: Flexible robot with variable stiffness in transoral surgery. IEEE/ASME Trans. Mechatron. 25(1), 1–10 (2019)
Dupont, P.E., et al.: A decade retrospective of medical robotics research from 2010 to 2020. Sci. Robot. 6(60), eabi8017 (2021)
Li, C., Gu, X., Xiao, X., Lim, C.M., Duan, X., Ren, H.: A flexible transoral robot towards Covid-19 swab sampling. Front. Robot. AI 8, 612167 (2021)
Omisore, O.M., Han, S., Xiong, J., Li, H., Li, Z., Wang, L.: A review on flexible robotic systems for minimally invasive surgery. IEEE Trans. Syst. Man Cybern. Syst. 52(1), 631–644 (2020)
Li, Z., Wu, L., Ren, H., Yu, H.: Kinematic comparison of surgical tendon-driven manipulators and concentric tube manipulators. Mech. Mach. Theory 107, 148–165 (2017)
Hong, W., Schmitz, A., Bai, W., Berthet-Rayne, P., Xie, L., Yang, G.Z.: Design and compensation control of a flexible instrument for endoscopic surgery. In: 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 1860–1866. IEEE (2020)
Li, W., Shen, M., Gao, A., Yang, G.Z., Lo, B.: Towards a snake-like flexible robot for endoscopic submucosal dissection. IEEE Trans. Med. Robot. Bionics 3(1), 257–260 (2020)
Thai, M.T., Phan, P.T., Hoang, T.T., Low, H., Lovell, N.H., Do, T.N.: Design, fabrication, and hysteresis modeling of soft microtubule artificial muscle (SMAM) for medical applications. IEEE Robot. Autom. Lett. 6(3), 5089–5096 (2021)
Wang, Y., Zheng, H., Taylor, R.H., Au, K.W.S.: A handheld steerable surgical drill with a novel miniaturized articulated joint module for dexterous confined-space bone work. IEEE Trans. Biomed. Eng. 69(9), 2926–2934 (2022)
Bergeles, C., Gosline, A.H., Vasilyev, N.V., Codd, P.J., Del Nido, P.J., Dupont, P.E.: Concentric tube robot design and optimization based on task and anatomical constraints. IEEE Trans. Robot. 31(1), 67–84 (2015)
da Veiga, T.: Challenges of continuum robots in clinical context: a review. Progr. Biomed. Eng. 2(3), 032003 (2020)
Hwang, M., Kwon, D.S.: Strong continuum manipulator for flexible endoscopic surgery. IEEE/ASME Trans. Mechatron. 24(5), 2193–2203 (2019)
Gao, C., et al.: Fluoroscopic navigation for a surgical robotic system including a continuum manipulator. IEEE Trans. Biomed. Eng. 69(1), 453–464 (2021)
Shang, J., et al.: An articulated universal joint based flexible access robot for minimally invasive surgery. In: 2011 IEEE International Conference on Robotics and Automation, pp. 1147–1152. IEEE (2011)
Xu, K., Simaan, N.: Actuation compensation for flexible surgical snake-like robots with redundant remote actuation. In: Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, pp. 4148–4154. IEEE (2006)
Li, C., King, N.K.K., Ren, H.: Preliminary development of a skull-mounted lightweight parallel robot toward minimally invasive neurosurgery. In: 2018 International Symposium on Medical Robotics (ISMR), pp. 1–6. IEEE (2018)
Gao, H., et al.: A miniature 3-DOF flexible parallel robotic wrist using niti wires for gastrointestinal endoscopic surgery. arXiv preprint arXiv:2207.04735 (2022)
Li, C., Gu, X., Xiao, X., Lim, C.M., Ren, H.: Cadaveric feasibility study of a teleoperated parallel continuum robot with variable stiffness for transoral surgery. Med. Biol. Eng. Comput. 58, 2063–2069 (2020)
Xu, K., Simaan, N.: Analytic formulation for kinematics, statics, and shape restoration of multibackbone continuum robots via elliptic integrals. Mech. Robot. 107, 58 (2010)
Du, H., et al.: Advancing computer-assisted orthopaedic surgery using a hexapod device for closed diaphyseal fracture reduction. Int. J. Med. Robot. Comput. Assist. Surg. 11(3), 348–359 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Diao, J., Qian, C., Xiao, X., Duan, X., Li, C. (2023). A Flexible Parallel Robotic Wrist Towards Transluminal Endoscopic Surgery. In: Yang, H., et al. Intelligent Robotics and Applications. ICIRA 2023. Lecture Notes in Computer Science(), vol 14269. Springer, Singapore. https://doi.org/10.1007/978-981-99-6489-5_34
Download citation
DOI: https://doi.org/10.1007/978-981-99-6489-5_34
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-6488-8
Online ISBN: 978-981-99-6489-5
eBook Packages: Computer ScienceComputer Science (R0)