
Abstract
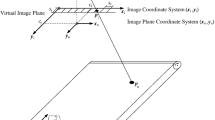
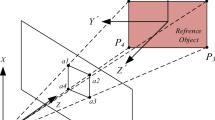
This paper presents a new method for three-dimensional camera calibration in which the rotation parameters are decoupled from the translation parameters. First, the rotation parameters are obtained by projecting three sets of parallel lines independently of the translation parameters and the imaging distance from the lens to the image plane. The virtual line passing through the image center, which is calculated by perspective projection of a set of parallel lines, depends only on the rotation parameters. Next, the translation parameters and the imaging distance are analytically obtained. Experimental results are used to show how the camera model can be accurately reconstructed in an easily prepared environment.
Similar content being viewed by others

References
Echigo T, Yachida M (1985) A fast method for extraction of 3-D information using multiple stripes and two cameras. In: Proceedings of IJCAI-85, pp 1127–1130
Ganapaphy S (1984) Decomposition of transformation matrices for robot vision. In: Proceedings of International Conference on Robotics and Automation, pp 130–139
Gennery DB (1979) Stereo-camera calibration. In: Proceedings of Image Understanding Workshop, November, pp 101–108
Ikeuchi K (1984) Shape from regular pattern. Artificial Intelligence 22:49–75
Kasai T, Asahi T, Yoshimori T, Tsuji S (1983) Measurement system of 3-D motion using a pair of position sensing detector cameras (in Japanese). SICE 19(12):997–1003
Martins HA, Birk JR, Kelley RB (1981) Camera models based on data from two calibration planes. Computer Graphics Image Processing 17:173–180
Ohta Y, Maenobu K, Sakai T (1981) Obtaining surface orientation from texels under perspective projection. In: Proceedings of IJCAI-81, pp 746–751
Shakunaga T, Kaneko H (1986) Perspective angle transform and its application to 3-D configuration recovery. In: Proceedings of CVPR-86, pp 594–601
Sobel I (1974) On calibrating computer controlled cameras for perceiving 3-D scenes. Artificial Intelligence 5:185–198
Tsai RY (1985) A versatile camera calibration technique for high accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IBM Research Report, RC51342, May 8
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Echigo, T. A camera calibration technique using three sets of parallel lines. Machine Vis. Apps. 3, 159–167 (1990). https://doi.org/10.1007/BF01214428
Issue Date:
DOI: https://doi.org/10.1007/BF01214428