
Abstract
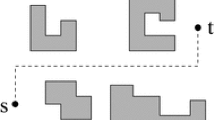
Given a set of nonintersecting polygonal obstacles in the plane, thelink distance between two pointss andt is the minimum number of edges required to form a polygonal path connectings tot that avoids all obstacles. We present an algorithm that computes the link distance (and a corresponding minimum-link path) between two points in timeO(Eα(n) log2 n) (and spaceO(E)), wheren is the total number of edges of the obstacles,E is the size of the visibility graph, and α(n) denotes the extremely slowly growing inverse of Ackermann's function. We show how to extend our method to allow computation of a tree (rooted ats) of minimum-link paths froms to all obstacle vertices. This leads to a method of solving the query version of our problem (for query pointst).
Similar content being viewed by others
References
P. K. Agarwal, Intersection and Decomposition Algorithms for Arrangements of Curves in the Plane, Ph.D. Dissertation, Robotics Report No. 207, Department of Computer Science, New York University, August 1989.
M. Ben-Or, Lower bounds for algebraic computation trees,Proc. 15th ACM Symposium on the Theory of Computing, 1983, pp. 80–86.
J. Canny and J. Reif, New lower bound techniques for robot motion planning and real geometry,Proc. 28th IEEE Symposium on the Foundations of Computer Science, 1987, pp. 39–48.
B. Chazelle, Triangulating a simple polygon in linear time,Discrete Comput. Geom. 6 (1991), 485–524.
B. Chazelle and H. Edelsbrunner, An optimal algorithm for intersecting line segments in the plane,J. Assoc. Comput. Mach. 39 (1992), 1–54.
H. N. Djidjev, A. Lingas, and J. Sack, AnO(n logn) algorithm for computing the link center of a simple polygon,Proc. 6th Annual Symposium on the Theoretical Aspects of Computer Science, Paderborn, February 1989, eds. B. Monien and R. Cori, Lecture Notes in Computer Science, Vol. 349, Springer-Verlag, Berlin, 1989, pp. 96–107. To appear inDiscrete Comput. Geom.
C. Ó'Dúnlaing, A tight lower bound for the complexity of path-planning for a disc,Inform. Process. Lett. 28 (1988), 165–170.
H. Edelsbrunner, L. J. Guibas, and M. Sharir, The complexity and construction of many faces in arrangements of lines and of segments,Discrete Comput. Geom. 5 (1990), 161–196.
H. Edelsbrunner, L. J. Guibas, and J. Stolfi, Optimal point location in a monotone subdivision,SIAM J. Comput. 15 (1986), 317–340.
H. A. El Gindy and D. Avis, A linear algorithm for computing the visibility polygon from a point,J. Algorithms 2 (1981), 186–197.
S. K. Ghosh and D. M. Mount, An output-sensitive algorithm for computing visibility graphs,SIAM J. Comput. 20 (1991), 888–910.
S. Hart and M. Sharir, Nonlinearity of Davenport-Schinzel sequences and of generalized path compression schemes,Combinatorica 6 (1986), 151–177.
B. Joe and R. B. Simpson, Correction to Lee's visibility polygon algorithm,BIT 27 (1987), 458–473.
Y. Ke, An efficient algorithm for link distance problems,Proc. 5th Annual ACM Symposium on Computational Geometry, 1989, pp. 69–78.
D. T. Lee, Visibility of a simple polygon,Comput. Vision Graphics Image Process. 22 (1983), 207–221.
W. Lenhart, R. Pollack, J. Sack, M. Sharir, R. Seidel, S. Suri, G. Toussaint, S. Whitesides, and C. Yap, Computing the link center of a simple polygon,Discrete Comput. Geom. 3 (1988), 281–293.
J. S. B. Mitchell, G. Rote, and G. Woeginger, Minimum-link paths among obstacles in the plane (extended abstract),Proc. 6th Annual ACM Symposium on Computational Geometry, 1990, pp. 63–72.
J. S. B. Mitchell and E. Welzl, Dynamically maintaining a visibility graph under insertions of new obstacles, Manuscript, Cornell University, 1989.
S. Suri, A linear time algorithm for minimum link paths inside a simple polygon,Comput. Vision Graphics Image Process.35 (1986), 99–110.
S. Suri and J. O'Rourke, Worst-case optimal algorithms for constructing visibility polygons with holes,Proc. 2nd Annual Symposium on Computational Geometry, 1986, pp. 14–23.
Author information
Authors and Affiliations
Additional information
Communicated by Mikhail J. Atallah.
Joseph Mitchell was partially supported by NSF Grants IRI-8710858 and ECSE-8857642, and by a grant from Hughes Research Laboratories. This work was begun while Günter Rote and Gerhard Woeginger were at the Freie Universität Berlin, Fachbereich Mathematik, Institut für Informatik, and it was partially supported by the ESPRIT II Basic Research Actions Program of the EC under Contract No. 3075 (project ALCOM). Gerhard Woeginger acknowledges the support by the Fonds zur Förderung der Wissenschaftlichen Forschung, Projekt S32/01.
Rights and permissions
About this article
Cite this article
Mitchell, J.S.B., Rote, G. & Woeginger, G. Minimum-link paths among obstacles in the plane. Algorithmica 8, 431–459 (1992). https://doi.org/10.1007/BF01758855
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF01758855