
Abstract
We study several pre-communication protocols in a coordination game with incomplete information. Under decentralized decision making, we show that informative communication can be sustained in equilibrium, yet miscoordination arises with positive probabilities. Moreover, the equilibrium takes a partitional structure and messages are rank ordered, with higher messages becoming increasingly imprecise. Compared to centralized decision making (a mediator without commitment), decentralization leads to more informative communication when the miscoordination cost is high, and performs better when the miscoordination cost is intermediate. We also study the case in which the mediator is able to commit to a decision rule beforehand.


Similar content being viewed by others

Notes
Further justification for this class of equilibria is provided in Sect. 4.
An extensive discussion of the informativeness of cheap talk in coordination and other games alike can be found in Farrell and Rabin (1996).
Matthews and Postlewaite (1989) and Farrell and Gibbons (1989) both study pre-communication in double auctions. Baliga and Morris (2002) analyze the role of cheap-talk in two player games with one-sided private information. The games analyzed in their paper have both features of coordination and spillovers.
Another difference is that, in their setting with a mediator, they can use the Revelation Principle to fully characterize all incentive compatible mechanisms. However, with types being continuous in our model, though the Revelation Principle applies, it is impossible to fully characterize all incentive compatible mechanisms.
McGee and Yang (2013) also study a setting with multiple senders who have non-overlapping private information, but the receiver’s decision is continuous.
The assumption of uniform distribution is standard in the literature of cheap talk with multiple senders, e.g. ADM.
If we add c to all the payoffs in the payoff matrix, then the payoffs look more like those in the BoS game (c becomes the coordination benefit enjoyed by both agents when they choose the same action). But this is just a normalization, which would not qualitatively affect our results.
Translating into our setting, it means that both agents get \(-c\) whenever miscoordination occurs.
More precisely, \(\max \{ \theta _{1},\theta _{2}\} \le 1\le 2c\) when \(c\ge 1/2\).
If \(\widehat{\theta }\ge 1/2\), meaning that the other agent yields with a probability higher than 1 / 2, then agent i’s indifference type between sticking and yielding is strictly below 1 / 2.
Recall that \(\theta _{1}\) and \(\theta _{2}\) are independent from each other.
Note that under \((m_{n},m_{n^{\prime }})\), \(n>n^{\prime }\) (agent 1’s message is higher), the other BNE in which both agents choose agent 2’s favored action B might still exist.
According to their experiment, when two agents send different messages, about \(80\%\) of the time they coordinate on the action favored by the agent who sends the higher message.
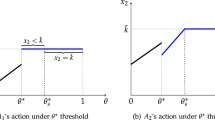
It is interesting to observe that, in equilibrium, not only the marginal type \(a_{n}\) is indifferent between sending messages \(m_{n}\) and \(m_{n+1}\), but all types within \([x_{n},x_{n+1}]\) are indifferent between sending messages \(m_{n}\) and \(m_{n+1}\). On the other hand, a type \(\theta \in [x_{n+1},a_{n+1}]\) strictly prefers sending message \(m_{n+1}\) to message \(m_{n}\).
In the sense that the lengths of adjacent intervals become more even. This result holds as long as N is finite.
Both \(a_{N-1}\) and \(x_{N}\) are smaller than c, thus any miscoordination is socially inefficient.
In a N-partition equilibrium, the expected miscoordination cost can be computed as \(\Sigma _{n=1}^{n=N}[(\Delta x_{n} )^{2}+(\Delta y_{n})^{2}]c\). Since the \(\{ \Delta x_{n}\}\) and \(\{ \Delta y_{n}\}\) are strictly positive and always sum up to 1, and \(\Delta x_{N}\) and \(\Delta y_{N}\) decrease in N (part (ii) of Lemma 4), the expected miscoordination cost is strictly decreasing in N.
When N goes to \(\infty \), the equilibrium partition must converge. To see this, define \(a_{N-1}(N)\) as the largest message cutoff in the N-partition equilibrium. By Lemma 1, \(a_{N-1}(N)\le c\) for any N, and by Lemma 4\(a_{N-1}(N)\) is increasing in N. Therefore, \(a_{N-1}(N)\) must converge as N goes to infinity. This also implies that all other message cutoffs converge, as the difference equation system holds for any N.
The difference equations characterizing the equilibria are also different. In ADM the difference equation has an analytical solution, but the one in our model does not have an analytical solution.
When \(c\ge 1\), the following symmetric PBE is more efficient than symmetric partition PBE. There are two messages, say h and l. Each agent (regardless of type) randomly sends each message with probability 1 / 2. If two agents send the same message, then both agents play A; otherwise, both play B. In this symmetric PBE, miscoordination is completely avoided, but agents’ private information is not utilized either. Since c is high, avoiding miscoordination is more important, making this equilibrium more efficient than symmetric partition PBE.
Since the expected payoff converges quickly as the number of partition N increases, we use \(N=20\) to approximate the converged payoff.
As N increases, the overall probability of miscoordination quickly converges to that of the most informative equilibrium.
We want to point out that when the cost of miscoordination is relatively small (\(c<\frac{1}{5}\)), even the two-partition equilibrium can achieve a majority gain of the first-best social surplus, similar to a finding in McAfee (2002) in the context of assortative matching. In particular, when \(c=1/10\), the ratio of the expected payoff under the two-partition equilibrium to the first-best payoff is \(99\%,\) and it is about \(94\%\) when \(c=1/5\). However, the efficiency of the two-partition equilibrium declines quickly as the cost of miscoordination increases further.
In the numerical simulation, we choose \(N=100\). This is because the expected payoff quickly converges when \(N>20\).
The other messages are very accurate, but the highest message is very noisy, with all types above 0.197 pooled together. The same pattern holds for c smaller than 0.3.
When \(c=\frac{3}{4}-\frac{\sqrt{3} }{4}\), the mediator is indifferent between choosing AB and AA or BB when both agents send the high message. However, in this case, only the following equilibrium exists: outcome AB is chosen for sure when both agents send the high message. If the probability of choosing AB is strictly less than 1, then the message cutoff a will decrease, and choosing AB is no longer optimal for the mediator (since \(\overline{m}_{2}\) decreases with a), which destroys equilibrium.
Our model corresponds to the case when \(\lambda =1\) in their model. That is, each agent only cares about his own payoff.
To the best our knowledge, nobody has done that in the existing literature.
Recall that it is socially inefficient to implement outcome AB whenever \(1<2c\).
References
Alonso R, Dessein W, Matoschek N (2008) When does coordination require centralization. Am Econ Rev 98(1):145–79
Baliga S, Morris S (2002) Coordination, spillovers, cheap talk. J Econ Theory 105(2):450–68
Banks JS, Calvert RL (1992) A battle-of-the-sexes game with incomplete information. Games Econ Behav 4:347–72
Ben-Porath E (2003) Cheap talk in games with incomplete information. J Econ Theory 108:45–71
Bergemann D, Morris S (2011) Correlated equilibrium in games with incomplete information, working paper
Cooper R, DeJong DV, Forsythe R, Ross TW (1989) Communication in the battle of the sexes game: some experimental results. RAND J Econ 20(4):568–87
Cooper R, DeJong DV, Forsythe R, Ross TW (1992) Communication in coordination games. Q J Econ 107(2):739–71
Crawford V, Sobel J (1982) Strategic information transmission. Econometrica 50:143–51
Dessein W (2002) Authority and communication in organizations. Rev Econ Stud 69(4):811–38
Farrell J (1987) Cheap talk, coordination, and entry. RAND J Econ 18(1):34–39
Farrell J, Gibbons R (1989) Cheap talk can matter in bargaining. Jo Econ Theory 48(1):221–37
Farrell J, Rabin M (1996) Cheap talk. J Econ Perspect 10(3):103–18
Forges F (1990) Universal mechanisms. Econometrica 58:1341–64
Ganguly C, Ray I (2017) Information revelation and coordination using cheap talk in a game with two-sided private information, Discussion Paper 35, CRETA, Department of Economics, University of Warwick
Gerardi D (2004) Unmediated communication in games with complete and incomplete information. J Econ Theory 114:104–131
Gibbons R (1992) Game theory for applied economists. Princeton University Press, Princeton
Goltsman M, Horner J, Pavlov G, Squintani F (2009) Mediation, arbitration and negotiation. J Econ Theory 144:1397–1420
Harris M, Raviv A (2005) Allocation of decision-making authority. Rev Financ 9(3):353–83
Hu Y, Kagel JH, Yang H, Zhang L (2018) The effects of pre-play communication in a coordination game with incomplete information, working paper
Krishna RV (2007) Communication in games of incomplete information: two players. J Econ Theory 132:584–592
Li Z (2018) Project selection with sequential search and cheap talk, working paper
Li Z, Rantakari H, Yang H (2016) Competitive cheap talk. Games Econ Behav 96:65–89
Matthews S, Postlewaite A (1989) Pre-play communication in two-person sealed-bid auctions. J Econ Theory 48:245–52
McAfee RP (2002) Coarse matching. Econometrica 70(5):2025–34
McGee A, Yang H (2013) Cheap talk with two senders and complementary information. Games Econ Behav 79:181–191
Mulumad N, Shibano T (1991) Communication in settings with no transfers. RAND J Econ 22(1):173–98
Myerson RB (1991) Game theory. Harvard University Press, Cambridge
Rantakari H (2008) Governing adaptation. Rev Econ Stud 75(4):1257–85
Rantakari H (2014) A Simple model of project selection with strategic communication and uncertain motives. J Econ Behav Org 104:14–42
Rantakari H (2016) Soliciting advice: active versus passive principals. J Law Econ Org 32(4):719–761
Vida P, Forges F (2013) Implementation of communication equilibria by correlated cheap talk: the two-player case. Theor Econ 8:95–123
Author information
Authors and Affiliations
Corresponding author
Additional information
We would like to thank two anonymous referees, Jim Peck, and seminar participants at Shandong University and SWUFE, for very helpful suggestions and comments. Li acknowledges the support by Pujiang Talent Plan of Shanghai (No. 17PJC042). Zhang acknowledges the support by the 111 Project B16040.
Appendix
Appendix
1.1 Proof of Lemma 1
Proof
Suppose \(a_{N-1}\ge c\), consider the marginal type of agent 1 with \(\theta _{1}=a_{N-1}\). Since \(a_{N-1}\ge c\), the marginal type has a dominant strategy, which is always playing his favored action A regardless of the messages sent in the first stage. We can compute the marginal type’s expected payoffs by sending message \(m_{N-1}\) and by sending message \(m_{N}\) as follows:
It can be readily verified that \(\pi _{1}(a_{N-1},m_{N})>\pi _{1}(a_{N-1} ,m_{N-1})\), as \(x_{N-1}<a_{N-1}\). Therefore, type \(a_{N-1}\) cannot be indifferent between sending messages \(m_{N-1}\) and \(m_{N}\), and thus equilibria with \(a_{N-1}\ge c\) do not exist. \(\square \)
1.2 Proof of Lemma 2
Proof
Given that the marginal type \(a_{n}\) is indifferent between sending messages \(m_{n}\) and \(m_{n+1}\), we only need to establish the following single crossing property
That is, a higher type agent has a weakly stronger incentive to send a higher message. By symmetry, we shall prove the inequality holds for agent 1 without any loss of generality.
Consider a type \(\theta \) of agent 1 with \(\theta \in [a_{n},a_{n+1}]\). If \(\theta \in [a_{n},x_{n+1}]\), when he sends message \(m_{n+1}\), his expected payoff is
Note that this type of agent 1 will yield if agent 2 sends message \(m_{n+1}\). If \(\theta \in [x_{n+1},a_{n+1}]\) and agent 1 sends message \(m_{n+1},\) his expected payoff is
Note that this type of agent 1 will stick if agent 2 sends message \(m_{n+1}\). On the other hand, if \(\ \theta \in [a_{n},a_{n+1}]\) and agent 1 sends message \(m_{n}\), his expected payoff is
Note that this type of agent 1 will stick if agent 2 sends message \(m_{n}\).
Combining the above results, we have
Thus, we have shown that \(\frac{\partial [\pi (m_{n+1},\theta )-\pi (m_{n},\theta )]}{\partial \theta }\ge 0\).
In addition, similarly we can show
Equation (12) and Equation (13) together imply that all types within \([x_{n},x_{n+1}]\) are indifferent between sending messages \(m_{n}\) and \(m_{n+1}\). \(\square \)
1.3 Proof of Lemma 3
Proof
(1) (Existence) Fix c and \(N\ge 2\). We want to show that the difference equation system has a solution. To that end, we first express all the message cutoffs \(\{a_{n}\}\) and the action cutoffs \(\{x_{n}\}\) as functions of \(x_{1}\) (and only \(x_{1}\) and c). Specifically, given \(x_{1}\) (\(\Delta x_{1}\equiv x_{1}\)), by applying (5) (\(\Delta y_{n}=\frac{c+x_{n}}{c-x_{n}}\Delta x_{n}\)) and (6) (\(\Delta x_{n+1}=\Delta y_{n}\)) recursively, all the \(\{ \Delta x_{n}\}\), \(\{x_{n}\}\), \(\{ \Delta y_{n}\}\), and \(\{a_{n}\}\) are determined. Define \(x_{n}=f_{n} (x_{1})\) and \(a_{n}=g_{n}(x_{1})\). Specifically,
Note that \(x_{n}<c\) (for all \(n\le N\)) is necessary for \(\Delta y_{n}\) to be well defined (\(\Delta y_{n}\ge 0\)). Define \(\widehat{x}_{1}\in [0,c)\) such that \(f_{N}(\widehat{x}_{1})=c\) and \(f_{n}(\widehat{x}_{1})<c\) for all \(n<N\). Such an \(\widehat{x}_{1}\) exists because, for \(x_{1}>0\) but sufficiently small, \(x_{n}<c\) for any \(n\le N\) and \(x_{n}\) strictly increases in n.
Now we restrict the domain of \(x_{1}\) to \([0,\widehat{x}_{1})\). For any \(x_{1}\in [0,\widehat{x}_{1})\), by applying (5) and (6) recursively, we can show that \(\Delta x_{n}\ge 0\) and \(\Delta y_{n}\ge 0\) for all \(n\le N\). Moreover, all the \(\Delta x_{n}\) and \(\Delta y_{n}\) are continuous in \(x_{1}\), and thus both \(f_{N}(x_{1})\) and \(g_{N}(x_{1})\) are continuous in \(x_{1}\). Note that \(x_{1}\) is a solution to the difference equation system if \(g_{N}(x_{1})=1\).
Suppose \(x_{1}=0\). Then, by the recursive structure, \(x_{n}=a_{n}=0\) for any \(n\le N\). Therefore, we have \(g_{N}(0)=0\). Now suppose \(x_{1}\rightarrow \widehat{x}_{1}\), and hence \(x_{N}=f_{N}(\widehat{x}_{1})\rightarrow c\). Then we have
Therefore, we have \(\lim _{x_{1}\rightarrow \widehat{x}_{1}}g_{N}(x_{1})=\infty \). Given the boundary conditions just derived, the continuity of \(g_{N} (\cdot )\) (in domain \([0,\widehat{x}_{1})\)) means that there is an \(x_{1} \in (0,\widehat{x}_{1})\) such that \(g_{N}(x_{1})=1\). That is, the difference equation system has a solution.
(2) (Uniqueness) To prove the uniqueness, fix \(N\ge 2\). Suppose there are two different solutions to the difference equation system: (a, x) and \((a^{\prime },x^{\prime })\). WLOG, suppose \(a_{N-1}^{\prime }>a_{N-1}\). By Eq. (2), \(a_{N-1}^{\prime }>a_{N-1}\) implies that \(x_{N}^{\prime }>x_{N}\). Therefore, \(\Delta y_{N}^{\prime }<\Delta y_{N}\). By (5), \(x_{N}^{\prime }>x_{N}\) implies that \(\frac{\Delta y_{N}^{\prime }}{\Delta x_{N}^{\prime }}>\frac{\Delta y_{N}}{\Delta x_{N}}\). Since \(\Delta y_{N}^{\prime }<\Delta y_{N}\), it further implies that \(\Delta x_{N}^{\prime }<\Delta x_{N}\). Now by (6), it means that \(\Delta y_{N-1}^{\prime }<\Delta y_{N-1}\). Moreover, from the facts that \(a_{N-1} ^{\prime }>a_{N-1}\) and \(\Delta y_{N-1}^{\prime }<\Delta y_{N-1}\), we get \(x_{N-1}^{\prime }>x_{N-1}\).
Now suppose \(a_{n}^{\prime }>a_{n}\) and \(\Delta y_{n}^{\prime }<\Delta y_{n}\), and thus \(x_{n}^{\prime }>x_{n}\), we want to show \(a_{n-1}^{\prime }>a_{n-1}\) and \(\Delta y_{n-1}^{\prime }<\Delta y_{n-1}\), and thus \(x_{n-1}^{\prime }>x_{n-1}\). By (5), \(x_{n}^{\prime }>x_{n}\) implies that \(\frac{\Delta y_{n}^{\prime }}{\Delta x_{n}^{\prime }}>\frac{\Delta y_{n} }{\Delta x_{n}}\). Since \(\Delta y_{n}^{\prime }<\Delta y_{n}\), it further implies that \(\Delta x_{n}^{\prime }<\Delta x_{n}\). Now by (6), it means that \(\Delta y_{n-1}^{\prime }<\Delta y_{n-1}\). By the facts that \(x_{n}^{\prime }>x_{n}\) and \(\Delta x_{n}^{\prime }<\Delta x_{n}\), we get \(a_{n-1}^{\prime }>a_{n-1}\). Finally, the facts that \(\Delta y_{n-1}^{\prime }<\Delta y_{n-1}\) and \(a_{n-1}^{\prime }>a_{n-1}\) imply that \(x_{n-1}^{\prime }>x_{n-1}\).
Now by induction, we have \(\Delta y_{1}^{\prime }<\Delta y_{1}\), \(a_{1} ^{\prime }>a_{1}\), and \(x_{1}^{\prime }>x_{1}\). By (5), \(x_{1}^{\prime }>x_{1}\) implies that \(\frac{\Delta y_{1}^{\prime }}{\Delta x_{1}^{\prime }}>\frac{\Delta y_{1}}{\Delta x_{1}}\). Since \(\Delta y_{1}^{\prime }<\Delta y_{1}\), it implies that \(\Delta x_{1}^{\prime }<\Delta x_{1}\), which is equivalent to \(x_{1}^{\prime }<x_{1}\). A contradiction. \(\square \)
1.4 Proof of Lemma 4
Proof
Part (i). Fix \(N\ge 1\). First, we show that \(a_{N}^{\prime }>a_{N-1}\). Suppose to the contrary, \(a_{N}^{\prime }\le a_{N-1}\). Then by the same logic as in the proof for Lemma 3 (the uniqueness), we have \(\Delta y_{1}\le \Delta y_{2}^{\prime }\), \(a_{1}\ge a_{2}^{\prime }\), and \(x_{1}\ge x_{2}^{\prime }\). By (5), \(x_{1}\ge x_{2}^{\prime }\) implies that \(\frac{\Delta y_{2}^{\prime }}{\Delta x_{2}^{\prime }}\le \frac{\Delta y_{1} }{\Delta x_{1}}\). Since \(\Delta y_{1}\le \Delta y_{2}^{\prime }\), it implies that \(\Delta x_{1}\le \Delta x_{2}^{\prime }\), which further implies that \(x_{1}<x_{2}^{\prime }\). A contradiction. Therefore, \(a_{N}^{\prime }>a_{N-1}\).
By a similar logic, we can show that \(a_{N-1}>a_{N-1}^{\prime }\). Following the induction as in the proof for Lemma 3 (the uniqueness), we can show that \(\ldots a_{n}^{\prime }<a_{n}<a_{n+1}^{\prime }<a_{n+1}\ldots \).
Part (ii). We first show that \(\Delta y_{N+1}^{\prime }<\Delta y_{N}\). Suppose \(\Delta y_{N+1}^{\prime }\ge \Delta y_{N}\). Then it implies that \(x_{N+1} ^{\prime }\le x_{N}\). Since \(a_{N}^{\prime }>a_{N-1}\) (part (i)), we have \(\Delta x_{N+1}^{\prime }<\Delta x_{N+1}\). By (5), \(\Delta x_{N+1}^{\prime }<\Delta x_{N+1}\) and \(x_{N+1}^{\prime }\le x_{N}\) imply that \(\Delta y_{N+1}^{\prime }<\Delta y_{N}\), a contradiction. Note that \(\Delta y_{N+1}^{\prime }<\Delta y_{N}\) means \(x_{N+1}^{\prime }>x_{N}\). Next we show \(\Delta x_{N+1}^{\prime }<\Delta x_{N}\). Suppose \(\Delta x_{N+1}^{\prime } \ge \Delta x_{N}\). By (5), \(\Delta x_{N+1}^{\prime }\ge \Delta x_{N}\) and \(x_{N+1}^{\prime }>x_{N}\) imply that \(\Delta y_{N+1}^{\prime }>\Delta y_{N}\), a contradiction.
In a similar fashion, we can recursively show that \(\Delta y_{n+1}^{\prime }<\Delta y_{n}\) and \(\Delta x_{n+1}^{\prime }<\Delta x_{n}\).
where the last inequality uses the earlier results that \(\Delta x_{n}^{\prime }<\Delta x_{n}\) and \(x_{n}^{^{\prime }}<x_{n}\). \(\square \)
1.5 Proof of Lemma 5
Proof
We only need to rule out the existence of three-partition equilibria. First consider the case that \(\overline{m}_{1}\ge 2c\). Then by the monotonicity of \(\overline{m}_{n}\) in n, \(\overline{m}_{n}\ge 2c\) for all \(n=1,2,3\). This means that the mediator will always choose outcome AB for sure regardless of the messages. As a result, all the messages are outcome equivalent and the equilibrium is a babbling one. Second, consider the case that \(\overline{m}_{3}\le 2c\). By a similar logic, in this case outcome AB is never chosen and either AA or BB is chosen. As a result, in this case both agents will always send the highest message \(m_{3}\) (again a babbling equilibrium).
Now consider the case that \(\overline{m}_{1}<2c\) and \(\overline{m}_{3}>2c\). Suppose \(\overline{m}_{2}<2c\). Then outcome AB is chosen if and only if both agents send message \(m_{3}\). In this case all types of agent i with \(\theta _{i}\le a_{2}\) will have an incentive to send message \(m_{2}\), in order to increase the chance that his favored coordinated outcome is chosen. That is, the two low messages are essentially combined into a single message. Next suppose \(\overline{m}_{2}>2c\). Then outcome AB is chosen if the lower message is \(m_{2}\). In this case the two high messages are outcome equivalent and are essentially combined into a single message.
Now the only case left is \(\overline{m}_{1}<2c\), \(\overline{m}_{3}>2c\), and \(\overline{m}_{2}=2c\). This means that \(a_{2}>2c\) and \(a_{1}<2c\). To make \(m_{2}\) different from \(m_{1}\) and \(m_{3}\), let \(p\in (0,1)\) be the probability that outcome AB is chosen when both agents send \(m_{2}\) (AA and BB are chosen with the same probability \((1-p)/2\)), and \(q\in [0,1]\) be probability that outcome AB is chosen when one agent sends \(m_{3}\) and the other sends \(m_{2}\) (with probability \(1-q\) the favored coordinated outcome of the agent who sends \(m_{3}\) is chosen). Now consider the marginal type \(a_{2}\) of agent 1. His expected payoffs when sending messages \(m_{2}\) and \(m_{3}\) are
Taking the difference, we have
To show that \(\pi _{1}(a_{2},m_{3})-\pi _{1}(a_{2},m_{2})>0\), it is sufficient to show that \(-(q-p)c+\frac{1-p}{2}a_{2}>0\). Since \(a_{2}>2c\), we have
Therefore, \(\pi _{1}(a_{2},m_{3})-\pi _{1}(a_{2},m_{2})>0\). But this contradicts to the fact that type \(a_{2}\) of agent 1 should be indifferent between sending messages \(m_{2}\) and \(m_{3}\). \(\square \)
1.6 Proof of Lemma 6
.
Proof
Part (i). To see \(p_{BA}^{l}=0\) in the optimal mechanism, by Eq. (9), we have
By the above equations,
Define the objective function as \(F\left( p_{AB}^{l},p_{BA}^{l}\right) \). Suppose \(p_{BA}^{l}>0\). We construct
where \(\Delta \) is a sufficiently small and positive number. By construction, \(a\left( \widetilde{p}_{AB}^{l},\widetilde{p}_{BA}^{l}\right) =a\left( p_{AB}^{l},p_{BA}^{l}\right) .\) We thus have
which is positive. Therefore, in the optimal mechanism \(p_{BA}^{l}\) cannot be positive.
By a very similar proof, we can show that \(p_{BA}^{h}=0\) in the optimal mechanism.
Part (ii). Suppose to the contrary that \(c\le \frac{a}{2}\), which implies that \(a-c\ge \frac{a}{2}>0\). For the marginal type a agent, the expected payoff of sending the high message and that of sending the low message are
respectively (we have used the results in part (i) that \(p_{BA}^{h}=p_{BA} ^{l}=0\)). Notice that in the parenthesis the payoffs are linear combinations of \(a-c\) and \(\frac{a}{2}\). It follows that the lower bound of \(\pi _{1}(a,H)\) can be achieved at \(p_{AB}^{h}=0\), while the upper bound of \(\pi _{1}(a,L)\) can be achieved at \(p_{AB}^{l}=1\). Therefore,
which contradicts the fact that a is the marginal type who is indifferent between sending the low message and sending the high message.
Part (iii). We now show that \(p_{AB}^{l}\) cannot be positive in equilibrium. To see this, by Eq. (9), we have
Define the objective function as \(F\left( p_{AB}^{h},p_{AB}^{l}\right) \). Suppose \(p_{AB}^{l}>0\). We construct
where \(\Delta \) is positive and sufficiently small. By construction, \(a\left( \widetilde{p}_{AB}^{h},\widetilde{p}_{AB}^{l}\right) =a\left( p_{AB} ^{l},p_{AB}^{l}\right) \). We thus have
since \(c>\frac{a}{2}\). Therefore, \(p_{AB}^{l}\) cannot be positive in the optimal mechanism. \(\square \)
1.7 Proof of Lemma 7
Proof
Now define the LHS of (11) as G(a). It can be verified that \(G^{\prime }(a)>0\), \(G(0)<0\), and \(G(c)>0\). Therefore, \(a\in [0,c)\) for any \(p_{AB}^{h}\). By previous results, \(\frac{\partial a}{\partial p_{AB}^{h} }>0\), or a is increasing in \(p_{AB}^{h}\).
By (11), choosing \(p_{AB}^{h}\) is equivalent to choosing a. From (11), we can solve for \(p_{AB}^{h}\) as a function of a. Substituting \(p_{AB}^{h}\) in the objective function and simplifying, we get a new objective function F(a), with the restriction that \(a\in [0,\overline{a}]\), where \(\overline{a}\) is the solution to (11) when \(p_{AB}^{h}=1\). Specifically,
Observing (14), we notice that \(\frac{a(1-a)}{2c-a}\ge 0\) since \(2c>a\). It immediately follows that when \(c>1/2\), the optimal \(a=0\), which means that the optimal \(p_{AB}^{h}=0\). When \(c=1/2\), then any a is optimal, or any \(p_{AB}^{h}\in [0,1]\) is optimal. Now consider the case that \(c<1/2\). Since \(a<c\), it means that \(a<1/2\). For the term \(\frac{a(1-a)}{2c-a}\), the numerator \(a(1-a)\) is increasing in a since \(a<1/2\); the denominator is decreasing in a. Therefore, \(\frac{a(1-a)}{2c-a}\) is increasing in a for \(a\in [0,\overline{a}]\). As a result, the optimal a is the corner solution \(a=\overline{a}\), which implies that the optimal \(p_{AB}^{h}=1\). \(\square \)
Rights and permissions
About this article

Cite this article
Li, Z., Yang, H. & Zhang, L. Pre-communication in a coordination game with incomplete information. Int J Game Theory 48, 109–141 (2019). https://doi.org/10.1007/s00182-018-0637-7
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00182-018-0637-7