
Abstract.
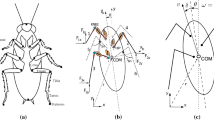
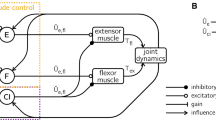
We extend the analysis of simple, energy-conserving models for the dynamics of insect locomotion in the horizontal plane developed in Schmitt and Holmes (2000a,b, 2001), where gaits characteristic of steady cockroach running and turning were evoked. In this paper, we include dissipation and energy inputs via active “muscles” in three forms: via prescribed torques at the “hip” pivot, via an active spring element of variable length, and via a pair of Hill-type muscle models representing an extensor/flexor system. Due to mechanical feedback of passive elastic forces, the stable gaits of the conservative models are preserved, and now energy input and absorption balances to additionally stabilize a preferred speed, with only modest neural sensing and feedback being required. However, these bipedal models still cannot simultaneously match observed moment-yaw magnitudes and fore-aft dynamics.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 17 September 2001 / Accepted: 20 February 2003 / Published online: 20 May 2003
Correspondence to: P. Holmes (e-mail: pholmes@math.Princeton.EDU)
Acknowledgements. This work was supported by DARPA/ONR: N00014-98-1-0747 and DoE: DE-FG02-95ER25238. John Schmitt was partially supported by a DoD Graduate Fellowship, a Wu Fellowship of the School of Engineering and Applied Science, and a George Van Ness Lothrop Honorific Fellowship of the Graduate School at Princeton University. We thank Kenneth Meijer for allowing us to use his muscle model in Sect. 4 and Bob Full and Dan Koditschek for numerous helpful suggestions.
Rights and permissions
About this article
Cite this article
Schmitt, J., Holmes, P. Mechanical models for insect locomotion: active muscles and energy losses. Biol. Cybern. 89, 43–55 (2003). https://doi.org/10.1007/s00422-003-0404-z
Issue Date:
DOI: https://doi.org/10.1007/s00422-003-0404-z