
Abstract.
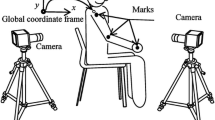
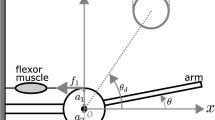
Human arm trajectories in natural unrestricted reaching movements were studied. They have particular properties such that a hand path is a rather simple straight or curved line, and a tangential velocity profile of hand is bell-shaped. Also these properties are invariant, independent of movement duration and hand-held load. In this study, trajectory formation is investigated on the basis of physiological characteristics of skeletal muscles, and a criterion prescribed by a derivative of isometric muscle torque is proposed. Subsequently, optimal trajectories are formulated under various conditions of movement to account for a planning strategy of human arm trajectories. In addition to such a theoretical approach, human arm trajectories are experimentally observed by a measuring system which provides a visual sensor and a target tracking device, enabling totally unrestricted movements. Then, optimal trajectories are quantitatively evaluated in comparison with experimental data in which essential properties of human arm trajectories are demonstrated. These results support the idea that human arm trajectories are planned in order to minimize the proposed criterion which is determined from physiological aspects. Finally, the physiological advantages of human arm trajectories are discussed with regard to the analysis of observed and optimal trajectories.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 2 December 1997 / Accepted in revised form: 20 March 1998
Rights and permissions
About this article
Cite this article
Kashima, T., Isurugi, Y. Trajectory formation based on physiological characteristics of skeletal muscles. Biol Cybern 78, 413–422 (1998). https://doi.org/10.1007/s004220050445
Issue Date:
DOI: https://doi.org/10.1007/s004220050445