
Abstract
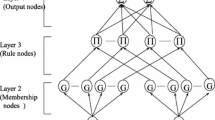
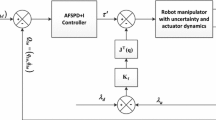
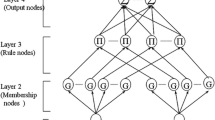
The performance of a controller for robot force tracking is affected by the uncertainties in both the robot dynamic model and the environmental stiffness. This paper aims to improve the controller’s robustness by applying the neural network to compensate for the uncertainties of the robot model at the input trajectory level rather than at the joint torque level. A self-adaptive fuzzy controller is introduced for robotic manipulator position/force control. Simulation results based on a two-degrees of freedom robot show that highly robust position/force tracking can be achieved, despite the existence of large uncertainties in the robot model.
Similar content being viewed by others
References
Miyamoto H, Kawato M, Setoyama T, Suzuki R (1988) Feedback error learning neural network for trajectory control of a robotic manipulator. Neural Netw 1:251–265
Yuh J, Lafshmi R (1993) An intelligent control system for remotely operated vehicles. IEEE J. Oceanic Eng 18:55–62
Lewis F.L, Liu K, Yesildirek A (1993) Neural net robot controller with guaranteed tracking performance. In: proceedings of the IEEE symposium on intelligent control, 1993, pp 225–231
Hu S, Ang MAH Jr, Krishnan H (2000) NN controller of the constrained robot under unknown constraint. 2000 IEEE
Ozaky T, Suzuki T, Furuhashi T, Okuma S, Uchikawa Y (1991) Trajectory control of robotic manipulators using neural networks. IEEE Trans. Indus Electron 38:195–202
Ishiguro A, Furuhashii T, Okuma S, Uchikawa Y (1992) A neural network compensator for uncertainties of robot manipulator. IEEE Ttans Indus Electron 39:61–66
Cai Z, Xie G, Wu C, Fu X (1998) Direct force/position control of robot with self-adaptive fuzzy control attached in force outer loop. Robot 20(4):297–302
Chen S-C, Tung P-C (2000) Application of a rule self-regulating fuzzy controller for robotic deburring on unknown contours. Fuzzy Sets Syst 110:341–350
Tung P-C, Fan S-N (1996) Application of fuzzy on-line self-adaptive controller for a contour tracking robot on unknown contours. Fuzzy Sets Syst 82:17–25
Jung S, Yim SB, Hsia T.C (2001)Experimental studies of neural network impedance force control for robot manipulators. In:Proceedings 2001 ICRA. IEEE international conference on robotics and automation, vol 4, pp 3453–3458
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wang, HR., Yang, L. & Wei, LX. Fuzzy-neuro position/force control for robotic manipulators with uncertainties. Soft Comput 11, 311–315 (2007). https://doi.org/10.1007/s00500-006-0082-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-006-0082-6