
Abstract
The hedge-algebras (HA) theory has been effectively applied in different fields such as fuzzy database, logic programming, classification and regression, data mining, linguistic database summarization, and process control. This work presents a simple approach to design an HA-based controller in stabilizing a nonlinear and underactuated system, an inverted pendulum-cart model, including four input state variables and one output control variable. The HA-based controller is divided into four intermediate controllers with one input state and one output control variable. The combination method of the above intermediate controllers to achieve values of the global control variable in control loops is proposed following the influence level of state variables on the stable state of the system and the principle of HA-Inference step. The proposed approach is appropriate for controlling underactuated systems. Simulation results have indicated that the HA-based controller has high performance, adaptation, stability, and robustness. Moreover, the proposed method significantly reduces the computational time of the controller when compared to a classical Sugeno-type fuzzy controller.















Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Data availability
Enquiries about data availability should be directed to the authors.
Abbreviations
- \(\,\left[ { - a_{i} ,a_{i} } \right]\) :
-
Reference domain of state variables, \(i = 1 \div 4\)
- \(\,\left[ { - b_{i} ,b_{i} } \right]\) :
-
Reference domain of intermediate control variables
- L & R :
-
Linguistic values Left & Right, respectively
- \(l_{P}\) :
-
Length of the pendulum in m
- \(l_{0}\) :
-
Distance from the joint position between pendulum and cart to the midpoint of the pendulum
- \(m_{C}\) :
-
Cart mass in kg
- \(m_{P}\) :
-
Pendulum mass in kg
- \((m_{P} ;l_{P} ;m_{C} )\) :
-
Configuration of the system
- \(u\) :
-
Control force in N
- \(u_{i}\) :
-
Intermediate control forces in N
- \(u_{is}\) :
-
Semantically quantifying mapping of \(u_{i}\)
- \(w_{i}\) :
-
Weight coefficients
- x :
-
Position of the cart
- \(x_{i}\) :
-
State variables
- \(x_{is}\) :
-
Semantically quantifying mapping of \(x_{i}\)
- \(\left[ {x_{i} (0)} \right]\) :
-
Initial conditions of state variables: \(x_{1} (0)\) in degree; \(x_{2} (0)\) in degree/s; \(x_{3} (0)\) in m; \(x_{4} (0)\) in m/s
- \(\alpha ,\beta\) :
-
Parameters in degree
- \(\varphi\) :
-
Angle between the pendulum and vertical direction/Deviation angle of the pendulum in degree
References
Ahmad S, Siddique NH, Tokhi MO (2011) A modular fuzzy control approach for two-wheeled wheelchair. J Intell Rob Syst 64:401–426
Anh ND, Bui HL, Vu NL, Tran DT (2013) Application of hedge algebra-based fuzzy controller to active control of a structure against earthquake. Struct Control Health Monit 20:483–495
Becerikli Y, Celik BK (2007) Fuzzy control of inverted pendulum and concept of stability using Java application. Math Comput Model 46:24–37
Bui H-L, Tran D-T, Vu N-L (2012) Optimal fuzzy control of an inverted pendulum. J Vib Control 18:2097–2110
Bui H-L, Nguyen C-H, Vu N-L, Nguyen C-H (2015) General design method of hedge-algebras-based fuzzy controllers and an application for structural active control. Appl Intell 43:251–275
Bui H-L, Le T-A, Bui V-B (2017a) Explicit formula of hedge-algebras-based fuzzy controller and applications in structural vibration control. Appl Soft Comput 60:150–166
Bui H-L, Nguyen C-H, Bui V-B, Le K-N, Tran H-Q (2017b) Vibration control of uncertain structures with actuator saturation using hedge-algebras-based fuzzy controller. J Vib Control 23:1984–2002
Bui V-B, Tran Q-C, Bui H-L (2018) Multi-objective optimal design of fuzzy controller for structural vibration control using Hedge-algebras approach. Artif Intell Rev 50:569–595
Bui H-L, Tran Q-C (2020) A new approach for tuning control rule based on hedge algebras theory and application in structural vibration control. J Vibrat Control:1077546320964307
Duc ND, Vu N-L, Tran D-T, Bui H-L (2012) A study on the application of hedge algebras to active fuzzy control of a seism-excited structure. J Vib Control 18:2186–2200
Ho N, Nam H (2002) Towards an algebraic foundation for a zadeh fuzzy logic. Fuzzy Set Syst 129:229–254
Ho NC, Van Long N (2007) Fuzziness measure on complete hedge algebras and quantifying semantics of terms in linear hedge algebras. Fuzzy Sets Syst 158:452–471
Ho NC, Lan VN, Viet LX (2008) Optimal hedge-algebras-based controller: design and application. Fuzzy Sets Syst 159:968–989
Hsu C-F, Lee T-T (2017) Emotional fuzzy sliding-mode control for unknown nonlinear systems. Int J Fuzzy Syst 19:942–953
Huang Y-S, Zhou D-Q (2011) Decentralized adaptive output feedback fuzzy controller for a class of large-scale nonlinear systems. Nonlinear Dyn 65:85–101
Khoi PB, Van Toan N (2018) Hedge-Algebras-based controller for mechanisms of relative manipulation. Int J Precis Eng Manuf 19:377–385
Li T-HS, Shieh M-Y (2000) Switching-type fuzzy sliding mode control of a cart–pole system. Mechatronics 10:91–109
Li J-H, Li T-HS, Ou T-H (2003) Design and implementation of fuzzy sliding-mode controller for a wedge balancing system. J Intell Rob Syst 37:285–306
Li Z, Xu C (2009) Adaptive fuzzy logic control of dynamic balance and motion for wheeled inverted pendulums. Fuzzy Sets Syst 160:1787–1803
Lian R-J, Lin B-F (2005) Design of a mixed fuzzy controller for multiple-input multiple-output systems. Mechatronics 15:1225–1252
Lin F (2007) Robust control design: an optimal control approach. Wiley, England
Liu Y, Yu H (2012) Fuzzy control of an underactuated pendulum-driven cart system. Int J Adv Mechatronic Syst 4:260–268
Margaliot M, Langholz G (2003) A new approach to fuzzy modeling and control of discrete-time systems. IEEE Trans Fuzzy Syst 11:486–494
Ochoa P, Castillo O, Soria J (2020) Optimization of fuzzy controller design using a Differential Evolution algorithm with dynamic parameter adaptation based on Type-1 and Interval Type-2 fuzzy systems. Soft Comput 24:193–214
Rebai A, Guesmi K, Hemici B (2016) Adaptive fuzzy synergetic control for nonlinear hysteretic systems. Nonlinear Dyn 86:1445–1454
Rong B, Rui X, Tao L, Wang G (2018) Dynamics analysis and fuzzy anti-swing control design of overhead crane system based on Riccati discrete time transfer matrix method. Multibody SysDyn 43:279–295
Roose AI, Yahya S, Al-Rizzo H (2017) Fuzzy-logic control of an inverted pendulum on a cart. Comput Electr Eng 61:31–47
Tao C-W, Taur J-S, Wang CM, Chen U (2008) Fuzzy hierarchical swing-up and sliding position controller for the inverted pendulum–cart system. Fuzzy Sets Syst 159:2763–2784
Tran D-T, Bui V-B, Le T-A, Bui H-L (2019) Vibration control of a structure using sliding-mode hedge-algebras-based controller. Soft Comput 23:2047–2059
Vukadinović D, Bašić M, Nguyen CH, Vu NL, Nguyen TD (2014) Hedge-algebra-based voltage controller for a self-excited induction generator. Control Eng Pract 30:78–90
Wang J, Liu Z, Chen CP, Zhang Y, Lai G (2019) Extended dimension fuzzy adaptive control for nonlinear uncertain stochastic systems with actuator constraints. Nonlinear Dyn 98:1315–1329
Xiong N, Litz L (2002) Reduction of fuzzy control rules by means of premise learning–method and case study. Fuzzy Sets Syst 132:217–231
Yi J, Yubazaki N (2000) Stabilization fuzzy control of inverted pendulum systems. Artif Intell Eng 14:153–163
Yi J, Yubazaki N, Hirota K (2002) A new fuzzy controller for stabilization of parallel-type double inverted pendulum system. Fuzzy Sets Syst 126:105–119
Yue M, An C, Du Y, Sun J (2016) Indirect adaptive fuzzy control for a nonholonomic/underactuated wheeled inverted pendulum vehicle based on a data-driven trajectory planner. Fuzzy Sets Syst 290:158–177
Zarafshan P, Moosavian SAA (2017) Fuzzy tuning control approach to perform cooperative object manipulation by a rigid–flexible multibody robot. Multibody SysDyn 40:213–233
Funding
This study was funded by Vietnam National Foundation for Science and Technology Development (NAFOSTED) under grant number “107.01-2017.306”.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares no conflict of interest.
Availability of data and material
All datasets of the paper are available to readers.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
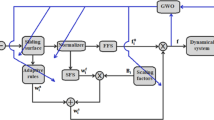
This section presents the parameters of the Sugeno-type fuzzy controller (FC). The algorithm diagram of FC is similar to that of HAC, as shown in Fig. 2, where.
-
The fuzzification step of each state variable using triangular membership functions is represented in Fig.
Fig. 16 
Fuzzification step of each state variable
16. Linguistic values L, Z, and R of each control variable are assigned by constants 0.25, 0.5, and 0.75, respectively.
-
The rule base of FC is similar to that of HAC, as arranged in Table 3, where the linguistic value W is replaced by Z.
-
Other parameters of the controller are given as follows:


-
The inference step of FC is expressed by the relation shown in Fig. 17.
Fig. 17 
The inference step of FC
-
The defuzzification of FC iss the weighted average of all rule outputs.

Appendix 2
Equation (9) is rewritten in the state space as follows:
The objective function with the minimum energy is chosen as:
In which
The Riccati equation is given as follows:
By solving Eq. (20) to calculate K, the control rule is obtained as:
Rights and permissions
About this article

Cite this article
Bui, HL., Pham, MN. & Nguyen, TTH. Swing-up control of an inverted pendulum cart system using the approach of Hedge-algebras theory. Soft Comput 26, 4613–4627 (2022). https://doi.org/10.1007/s00500-022-06968-2
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-022-06968-2