
Abstract
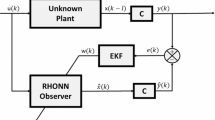
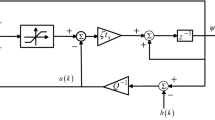
This paper presents a novel approach in designing adaptive controller to improve the transient performance for a class of nonlinear discrete-time systems under different operating modes. The proposed scheme consists of generalized minimum variance (GMV) controllers and a compensating controller. GMV controllers are based on the known nominal linear multiple models, while the compensating controller is based upon a recurrent neural network. The adaptation law of network weight is derived from Lyapunov stability theory. A suitable switching control strategy is applied to choose the best controller by the performance indices at every sampling instant. Simulations are discussed in order to illustrate the merits of the proposed method.



Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Athans M, Castanon D, Dunn K (1977) The stochastic control of the F-8C aircraft using a multiple model adaptive control (MMAC) method–Part I: equilibrium flight. IEEE Trans Autom Control 22(5):768–780
Lainiotis DG (1971) Optimal adaptive estimation: structure and parameter adaptation. IEEE Trans Autom Control 16(2):160–170
Narendra KS, Balakrishnan J (1994) Improving transient response of adaptive control systems using multiple models and switching. IEEE Trans Autom Control 39(9):1861–1866
Narendra KS, Balakrishnan J (1997) Adaptive control using multiple models and switching. IEEE Trans Autom Control 42(2):171–187
Narendra KS, Driolet O, Feiler M, George K (2003) Adaptive control using multiple models, switching and tuning. Int J Adapt Contr Signal Proc 17(2):87–102
Lourenco JMA, Lemos JM (2006) Learning in multiple model adaptive control switch. IEEE Instrum Meas Mag 9(3):24–29
Chen LJ, Narendra KS (2001) Nonlinear adaptive control using neural networks and multiple models. Automatica 37(8):1245–1255
Xi YG, Wang F (1996) Nonlinear multi-model predictive control. Acta Autom Sin 22(4):456–461
Lin CM, Hsu CF (2003) Neural network hybrid control for antilock braking systems. IEEE Trans Neural Netw 14(2):351–359
Wang CH, Lin TC, Lee TT, Liu HL (2002) Adaptive hybrid intelligent control for uncertain nonlinear dynamical systems. IEEE Trans Syst Man Cybern B 32(5):583–597
Ibarrola JJ, Pinzolas M, Cano JM (2005) A neurofuzzy scheme to on-line identification in an adaptive–predictive control. Neural Comput Appl 15:41–48
Zhai JY, Fei SM, Zhang KJ (2006) A discrete-time system adaptive control using multiple models and RBF neural networks. In: Wang J (ed) International symposium on neural networks. Springer, Berlin, pp 881–887
Tsoi AC, Back AD (1997) Discrete time recurrent neural network architectures: a unifying review. Neurcomputing 15(3):183–223
Zhu QM, Guo LZ (2004) Stable adaptive neurocontrol for nonlinear discrete-time systems. IEEE Trans Neural Netw 15(3):653–662
Morse AS, Mayne DQ, Goodwin GC (1992) Applications of hysteresis switching in parameter adaptive control. IEEE Trans Autom Control 37(9):1343–1354
Acknowledgments
The authors would like to thank the anonymous reviewers for their constructive and insightful comments for further improving the quality of this work. This work is supported by National Natural Science Foundation of China (60404006, 60574006).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhai, JY., Fei, SM. & Mo, XH. Multiple models switching control based on recurrent neural networks. Neural Comput & Applic 17, 365–371 (2008). https://doi.org/10.1007/s00521-007-0123-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-007-0123-9