
Abstract
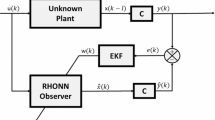
This work proposes a discrete-time nonlinear neural identifier based on a recurrent high-order neural network trained with an extended Kalman filter-based algorithm for discrete-time deterministic multiple-input multiple-output systems with unknown dynamics and time-delay. To prove the semi-globally uniformly ultimately boundedness of the proposed neural identifier, the stability analysis based on the Lyapunov approach is included. Applicability of the proposed identifier is shown via simulation and experimental results, all of them performed under the presence of unknown external and internal disturbances as well as unknown time-delays.




















Similar content being viewed by others

Notes
MATLAB is a registered trademark of The MathWorks, Inc.
Simulink is a registered trademark of The MathWorks, Inc.
dSPACE is a registered trademark of DSPACE GmbH.
LAB-Volt is a registered trademark of Lab-Volt Systems, Inc.
SENC 50 is a registered trademark of ACU-RITE.
POWERSTAT is a registered trademark of Superior Electric Holding Group LLC.
ControlDesk is a registered trademark of DSPACE GmbH.
References
Alfaro-Ponce M, Argüelles A, Chairez I (2014) Continuous neural identifier for uncertain nonlinear systems with time delays in the input signal. Neural Netw 60:53–66
Bedoui S, Ltaief M, Abderrahim K (2012) New results on discrete-time delay systems identification. Int J Autom Comput 9(6):570–577
Bengio Y, Simard P, Frasconi P (1994) Learning long-term dependencies with gradient descent is difficult. IEEE Trans Neural Netw 5(2):157–166
Boukas E, Liu Z (2002) Deterministic and stochastic time-delay systems. Control Engineering Birkhäuser, Birkhäuser, Boston
Chen C, Wen GX, Liu YJ, Wang FY (2014) Adaptive consensus control for a class of nonlinear multiagent time-delay systems using neural networks. IEEE Trans Neural Netw Learn Syst Actions 25(6):1217–1226
Fu L, Li P (2013) The research survey of system identification method. In: 2013 5th international conference on intelligent human-machine systems and cybernetics (IHMSC), vol 2. pp 397–401
Ge SS, Tee KP (2005) Adaptive neural network control of nonlinear mimo time-delay systems with unknown bounds on delay functionals. In: Proceedings of the 2005 American control conference, 2005, vol 7. pp 4790–4795
Haykin S (1999) Neural networks: a comprehensive foundation. Prentice Hall International, Englewood Cliffs
Haykin S (2004) Kalman filtering and neural networks. Wiley, New York
Hermans M, Schrauwen B (2010) One step backpropagation through time for learning input mapping in reservoir computing applied to speech recognition. In: Proceedings of 2010 IEEE international symposium on circuits and systems (ISCAS). pp 521–524
Hernandez-Gonzalez M, Sanchez E, Loukianov A. (2008) Discrete-time neural network control for a linear induction motor. In: IEEE international Symposium on intelligent control 2008 (ISIC 2008). pp 1314–1319
Hochreiter S (1998) Recurrent neural net learning and vanishing gradient. Int J Uncertain Fuzziness Knowl Based Syst 6(2):107–116
Hong Y, Ren X, Qin H (1996) Neural identification and control of uncertain nonlinear systems with time delay. In: Proceedings of the 35th IEEE conference on decision and control, 1996, vol 4. pp 3802–3803
Krstic M, Bekiaris-Liberis N (2012) Control of nonlinear delay systems: A tutorial. In: 2012 IEEE 51st annual conference on decision and control (CDC). pp 5200–5214
Kurose J, Ross K (2013) Computer networking: a top-down approach. Always Learning. Pearson, London
Leondes C (1998) Neural network systems techniques and applications: advances in theory and applications. Elsevier Science, Amsterdam
Lopez-Franco M, Landa D, Alanis A, Lopez-Franco C, Arana-Daniel N (2014) Discrete-time inverse optimal neural control for a tracked all terrain robot. In: XVI IEEE autumn meeting of power, electronics and computer science ROPEC 2014 international. pp 70–75
Mahmoud M (2000) Robust control and filtering for time-delay systems. Automation and control engineering. CRC Press
Mahmoud M (2010) Switched time-delay systems: stability and control. Springer, Berlin
Na J, Herrmann G, Ren X, Barber P (2009) Nonlinear observer design for discrete mimo systems with unknown time delay. In: Proceedings of the 48th IEEE conference on decision and control, 2009 held jointly with the 2009 28th Chinese control conference. (CDC/CCC 2009). pp 6137–6142
Ngoc P (2015) Novel criteria for exponential stability of nonlinear differential systems with delay. IEEE Trans Autom Control Actions 60(2):485–490
Norgaard M (2000) Neural networks for modelling and control of dynamic systems: a practitioner’s handbook. Springer, London
Rajapakse J, Wang L (2004) Neural information processing: research and development. Springer, Berlin
Ren X, Rad A (2007) Identification of nonlinear systems with unknown time delay based on time-delay neural networks. IEEE Trans Neural Netw 18(5):1536–1541
Richard JP (2003) Time-delay systems: an overview of some recent advances and open problems. Automatica 39:1667–1694
Rios J, Alanis A, Rivera J, Hernandez-Gonzalez M (2013) Real-time discrete neural identifier for a linear induction motor using a dSPACE DS1104 board. In: The 2013 international joint conference on neural networks (IJCNN). pp 1–6
Rovithakis G, Christodoulou M (2011) Adaptive control with recurrent high-order neural networks: theory and industrial applications. Advances in industrial control. Springer, London
Sanchez E, Alanis A, Garcia A, Loukianov A (2008) Discrete-time high order neural control: trained with Kalman filtering. Springer, Berlin
Song Y, Grizzle J (1992) The extended Kalman filter as a local asymptotic observer for nonlinear discrete-time systems. Am Control Conf 1992:3365–3369
Xian-Ming T, Jin-Shou Y (2008) Stability analysis for discrete time-delay systems. In: Fourth international conference on networked computing and advanced information management, 2008 (NCM’08), vol 1. pp 648–651
Xu H, Jagannathan S (2013) Neural network based finite horizon stochastic optimal controller design for nonlinear networked control systems. In: The 2013 international joint conference on neural networks (IJCNN). pp 1–7
Xu H, Jagannathan S (2013) Stochastic optimal controller design for uncertain nonlinear networked control system via neuro dynamic programming. IEEE Trans Neural Netw Learn Syst 24(3):471–484
Xu Z, Li X (2010) Control design based on state observer for nonlinear delay systems. In: 2010 Chinese control and decision conference (CCDC). pp 1946–1950
Yi S (2010) Time-delay systems: analysis and control using the Lambert W function. World Scientific, Singapore
Yu W, Sanchez E (2009) Advances in computational intelligence. Springer, Berlin
Zhong Q (2006) Robust control of time-delay systems. Springer, Berlin
Acknowledgments
The authors thank the support of CONACYT, Mexico, through Projects 106838Y, 156567Y and INFR-229696. They also thank the very useful comments of the anonymous reviewers, which help to improve the paper.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Proof of Theorem 1
Step 1, for \({\mathbf {V}}\left( k\right)\). First consider, the equation for each i-th neuron \((i=1,...,n)\)
with
then, (24) can be expressed as
Using the inequalities
which are valid \(\forall X,Y\in \mathfrak {R}^{n}\), \(\forall P\in \mathfrak {R}^{n\times n}, P=P^{T}>0,\) then (26) can be rewritten as
Then,
Defining
and selecting \(\eta _{i}\), \(\gamma _{i}\), \(Q_{i}\) and \(R_{i}\), such that \(E_{i}>0\) and \(F_{i}>0\), \(\forall k\), then, (29) can be expressed as
Hence, \(\Delta V_{i}\left( k\right) <0\) when
or
Step 2. Now for \({\mathbf {V}}\left( k\right)\), consider the Lyapunov function candidate.
Defining
and selecting \(\eta _{i}\), \(\gamma _{i}, Q_{i}\) and \(R_{i}\), such that \(E_{i}>0\) and \(F_{i}>0\), \(\forall k\), then, (24) can be expressed as
Hence, \(\Delta {\mathbf {V}}\left( k\right) <0\) when (31) or (32) is fulfilled
Therefore, considering Step 1 and Step 2 for (23), the solution of (10) and (14) is SGUUB. \(\square\)
Remark 1
Considering Theorem 1 and its proof, it can be easily shown that the result can be extended to a system (12) with multiple delays like \(x\left( k-l_{i}\right)\) with \(i=1,2,\ldots\), can be used instead of \(x\left( k-l\right)\) in (3) and/or for time-varying delays \(x\left( k-l_{i}\left( k\right) \right)\) with \(l_{i}\left( k\right)\) bounded by \(l_{i}\left( k\right) \le l\).
Rights and permissions
About this article

Cite this article
Alanis, A.Y., Rios, J.D., Arana-Daniel, N. et al. Neural identifier for unknown discrete-time nonlinear delayed systems. Neural Comput & Applic 27, 2453–2464 (2016). https://doi.org/10.1007/s00521-015-2016-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-015-2016-7