
Abstract
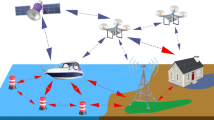
Collaboration among different ad hoc networks allows the formation of efficient guided networks. One of the such collaborative networks is formed between aerial ad hoc network and terrestrial ad hoc network. Simultaneous operation of both the networks can resolve complex missions collaboratively. Such cooperation can be achieved by deploying service models that allow efficient integration of distributed networks. The performance of service model can be enhanced by incorporating neural schema that provides a layered interface and cognitive transfers with higher accuracy. In this paper, a 3-tier neural model is proposed that allows the formation of guided ad hoc network. A layered network model is formulated that provides service-based integration of different network components required for the functioning of aerial guided ad hoc network along with provision for efficient service provisioning over flying ad hoc networks. The effectiveness and utility of the proposed model are demonstrated using simulations. Simulation study demonstrates that the proposed approach yields significant improvements in terms of service identification accuracy up to 13.6 %, fault identification up to 17.7 %, cognitive receival up to 23.56 %, fault tolerance up to 13.5 %, network errors reduction up to 34.11 %, and overheads up to 10 % compared to existing approaches.




















Similar content being viewed by others


References
Santamaria E, Royo P, Lopez J, Barrado C, Pastor E, Prats X (2007) Increasing uav capabilities through autopilot and flight plan abstraction. In: IEEE/AIAA 26th Digital avionics systems conference, 2007. DASC’07. IEEE, pp 5–B
Tan W, Fan Y, Zhou M, Tian Z (2010) Data-driven service composition in enterprise soa solutions: a petri net approach. IEEE Trans Autom Sci Eng 7(3):686–694
Al-Jaroodi J, Mohamed N (2012) Service-oriented middleware: a survey. J Netw Comput Appl 35(1):211–220
Rodrigues D, Estrella JC, Vieira M, Júnior JC, Branco KLC, Júnior OT (2011) Service-oriented architectures for complex safety-critical embedded systems: a case study on uavs. In: I Brazilian conference on critical-embedded systems (CBSEC), São Carlos, Brazil, pp 130–130
Kim K (2012) A model-driven workflow fragmentation framework for collaborative workflow architectures and systems. J Netw Comput Appl 35(1):97–110
Choi J, Cho Y, Choi J, Choi J (2014) A layered middleware architecture for automated robot services. Int J Distrib Sens Netw Article ID 201063. doi:10.1155/2014/201063:1-10
Paunicka JL, Corman DE, Mendel BR (2001) A CORBA-based middleware solution for uavs. In: Fourth IEEE international symposium on object-oriented real-time distributed computing, 2001. ISORC-2001. Proceedings. IEEE, pp 261–267
Paunicka JL, Mendel BR, Corman DE (2001) The OCP-an open middleware solution for embedded systems. In: American control conference, 2001. Proceedings of the 2001, vol 5. IEEE, pp 3445–3450
Floch J, Hallsteinsen S, Stav E, Eliassen F, Lund K, Gjorven E (2006) Using architecture models for runtime adaptability. IEEE Softw 23(2):62–70
Pastor E, Lopez J, Royo P (2006) A hardware/software architecture for UAV payload and mission control. In: 25th Digital avionics systems conference, 2006 IEEE/AIAA. IEEE, pp 1–8
Kramer J, Magee J (2007) Self-managed systems: an architectural challenge. In: Future of software engineering, 2007. FOSE’07. IEEE, pp 259–268
Suri N, Marcon M, Quitadamo R, Rebeschini M, Arguedas M, Stabellini S, Tortonesi M, Stefanelli C (2008) An adaptive and efficient peer-to-peer service-oriented architecture for manet environments with agile computing. In: Network operations and management symposium workshops, 2008. NOMS Workshops 2008. IEEE. IEEE, pp 364–371
Suri N (2009) Dynamic service-oriented architectures for tactical edge networks. In: Proceedings of the 4th workshop on emerging web services technology. ACM, pp 3–10
López J, Royo P, Pastor E, Barrado C, Santamaria E (2007) A middleware architecture for unmanned aircraft avionics. In: Proceedings of the 2007 ACM/IFIP/USENIX international conference on middleware companion. ACM, p 24
Frew EW, Brown TX (2009) Networking issues for small unmanned aircraft systems. J Intell Robot Syst 54(1–3):21–37
Peña N, Scarlatti D, Ollero A (2009) UAVs integration in the SWIM based architecture for ATM. J Intell Robot Syst 54(1–3):39–59
Heisey CW, Hendrickson AG, Chludzinski BJ, Cole RE, Ford M, Herbek L, Ljungberg M, Magdum Z, Marquis D, Mezhirov A et al (2013) A reference software architecture to support unmanned aircraft integration in the national airspace system. J Intell Robot Syst 69(1–4):41–55
Mohamed N, Al-Jaroodi J, Jawhar I, Lazarova-Molnar S (2013) Middleware requirements for collaborative unmanned aerial vehicles. In: 2013 International conference on unmanned aircraft systems (ICUAS). IEEE, pp 1051–1060
Marconato E, Rodrigues D, Chaves A, Ramdhany R, Branco K, Coulson G (2014) Unmanned aerial vehicles and service-oriented architecture: LARISSA and knowledge based frameworks first study. In: ICAS 2014, The Tenth International Conference on Autonomic and Autonomous Systems, pp 5–10
Dimitriou N, Sarakis L, Loukatos D, Kormentzas G, Skianis C (2011) Vertical handover (VHO) framework for future collaborative wireless networks. Int J Netw Manag 21(6):548–564
Sharma V, Kumar R (2015) A cooperative network framework for multi-uav guided ground ad hoc networks. J Intell Robot Syst 77(3–4):629–652
Sharma V, Kumar R (2014) service-oriented middleware for multi-UAV guided ad hoc networks. IT Converg Pract (INPRA) 2(3):24–33
Deng Z, Ma C, Zhu M (2012) A reconfigurable flight control system architecture for small unmanned aerial vehicles. In: Systems conference (SysCon), 2012 IEEE international. IEEE, pp 1–4
Mohamed N, Al-Jaroodi J, Jawhar I, Lazarova-Molnar S (2014) A service-oriented middleware for building collaborative uavs. J Intell Robot Syst 74(1–2):309–321
Chen G, Blasch E, Shen D, Chen H, Pham K (2010) Services oriented architecture (SOA)-based persistent isr simulation system. In: SPIE defense, security, and sensing. International Society for Optics and Photonics, pp 76941D–76941D
Madey GR, Blake MB, Poellabauer C, Lu H, McCune RR, Wei Y (2012) Applying DDDAS principles to command, control and mission planning for UAV swarms. Procedia Comput Sci 9:1177–1186
Sharma V, Kumar R (2015) An opportunistic cross layer design for efficient service dissemination over flying ad hoc networks (FANETs). In: 2015 2nd international conference on electronics and communication systems (ICECS). IEEE, pp 1551–1557
Acknowledgments
We are grateful to Editor-in-Chief and anonymous reviewers for their constructive comments and suggestions that helped in improving the quality of manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Informed consent
Authors have studied the COPE guidelines and have made sure that the manuscript falls well under the standard rules for publication.
Rights and permissions
About this article

Cite this article
Sharma, V., Kumar, R. Three-tier neural model for service provisioning over collaborative flying ad hoc networks. Neural Comput & Applic 29, 837–856 (2018). https://doi.org/10.1007/s00521-016-2584-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-016-2584-1