
Abstract
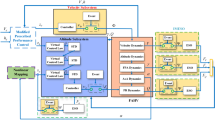
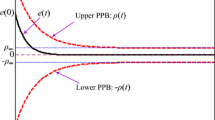
This work investigates a neural adaptive appointed-time control for flexible air-breathing hypersonic vehicles subject to modeling nonlinearities, flexible modes, parameter uncertainties and external disturbances. A relative threshold-based neural estimator (RTNE) using minimal learning parameterizations is proposed to online-identify the lumped disturbances with a reduced occupation of communication resource via utilizing intermittent states, while heavy computational burden for online learning is remarkably reduced in the premise of a competitive estimation accuracy. With the estimation results produced by RTNE, a neural adaptive event-triggered control is advanced by incorporating a relative threshold-based sampler into controller-to-actuator channel, such that unnecessary continuous sampling incurring in current time-driven researches can be successfully avoided. Moreover, an appointed-time prescribed performance control is constructed to make the responses of velocity and altitude subsystems evolve within pregiven regions with a user-defined settling time; meanwhile, the strict dependence on the exact knowledge for immeasurable initial system states is removed. The stability of system is proved by virtue of input-to-state stable method, and Zeno behavior is eliminated. Simulations are performed to certify the effectiveness of presented controller.










Similar content being viewed by others
Abbreviations
- \(V\) :
-
Velocity
- \(h\) :
-
Altitude
- \(\gamma\) :
-
Flight-path angle (FPA)
- \(\alpha\) :
-
Angle of attack (AoA)
- \(Q\) :
-
Pitch rate (PR)
- \({{\varvec{\upeta}}} \in R^{6 \times 1}\) :
-
Flexible states
- \(f_{i} ,g_{i} ,i = V,\gamma ,\alpha ,Q\) :
-
Modeling nonlinearities
- \(d_{i} ,i = V,\gamma ,\alpha ,Q\) :
-
Overall effects of disturbances
- \(d_{ie} ,i = V,\gamma ,\alpha ,Q\) :
-
External disturbances
- \(\Delta\) :
-
The perturbation of aerodynamic coefficients
- \(\Phi\) :
-
Fuel equivalence ratio (FER)
- \(\delta_{{\text{e}}}\) :
-
Elevator deflection
- \(z_{{\text{T}}}\) :
-
Thrust moment arm
- \(S\) :
-
Reference area
- \(\overline{c}\) :
-
Mean aerodynamics chord
- \(g\) :
-
Gravitation constant
- \(m\) :
-
Vehicle mass
- \(I_{yy}\) :
-
Moment of inertia
- \(T\) :
-
Thrust
- \(D\) :
-
Drag
- \(L\) :
-
Lift
- \(M\) :
-
Pitching moment
- \(N_{i} ,i = 1,2,3\) :
-
Generalized forces
References
Shi Y, Shao XL, Zhang WD (2020) Quantized learning control for flexible air-breathing hypersonic vehicle with limited actuator bandwidth and prescribed performance. Aerosp Sci Technol 97:105629
Bu XW, Wu XY, Ma Z (2016) Novel auxiliary error compensation design for the adaptive neural control of a constrained flexible air-breathing hypersonic vehicle. Neurocomputing 171:313–324
Bu XW (2019) Envelope-constraint-based tracking control of air-breathing hypersonic vehicles. Aerosp Sci Technol 95:105429
An H, Wu QQ, Wang CH (2018) Differentiator based full-envelope adaptive control of air-breathing hypersonic vehicles. Aerosp Sci Technol 82–83:312–322
Bu XW, Xiao Y, Wang K (2017) A prescribed performance control approach guaranteeing small overshoot for air-breathing hypersonic vehicles via neural approximation. Aerospace Sci Technol 7:485–498
Sonneveldt L, Chu QP, Mulder JA (2007) Nonlinear flight control design using constrained adaptive backstepping. J Guidance Control Dyn 30(2):322–336
Tang XN, Zhai D, Li XJ (2020) Adaptive fault-tolerance control based finite-time backstepping for hypersonic flight vehicle with full state constrains. Inf Sci 507:53–66
An H, Wu QQ (2019) Adaptive control of variable geometry inlet-configured air-breathing hypersonic vehicles. J Spacecr Rockets 56(5):1520–1530
Zong Q, Wang J, Tao Y (2013) Adaptive high-order dynamic sliding mode control for a flexible air-breathing hypersonic vehicle. Int J Robust Nonlinear Control 23(15):1718–1736
Meng YZ, Jiang B, Qi RY (2019) Adaptive fault-tolerant attitude tracking control of hypersonic vehicle subject to unexpected centroid-shift and state constraints. Aerosp Sci Technol 95:105515
Tao XL, Yi JQ, Pu ZQ (2019) State-estimator-integrated robust adaptive tracking control for flexible air-breathing hypersonic vehicle with noisy measurements. IEEE Trans Instrum Measurem 86(11):4285–4299
Wang J, Liu Z, Chen CL (2019) Event-triggered neural adaptive failure compensation control for stochastic systems with dead-zone output. Nonlinear Dyn 96:2179–2196
Lu LX, Liu Z, Lai GY (2019) Adaptive fuzzy output feedback control for nonlinear systems based on event-triggered mechanism. Inf Sci 486:419–433
Jia Q, Tang WKS (2018) Consensus of multi-agents with event-based nonlinear coupling over time-varying digraphs. IEEE Trans Circuits Syst II Express Briefs 65(12):1969–1973
Jia Q, Tang WKS (2017) Event-triggered protocol for the consensus of multi-agent systems with state-dependent nonlinear coupling. IEEE Trans Circuits Syst I Regular Pap 65(2):723–732
Wang YC, Zheng WX, Zhang HG (2017) Dynamic event-based control of nonlinear stochastic systems. IEEE Trans Autom Control 62(12):6544–6551
Lv MG, Wang D, Peng ZH (2020) Event-triggered neural network control of autonomous surface vehicles over wireless network. Sci China-Inf Sci 63(5):150205
Bechlioulis CP, Rovithakis GA (2008) Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans Autom Control 53(9):2090–2099
Bechlioulis CP, Rovithakis GA (2014) A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 50(4):1217–1226
Wang M, Yang AL (2017) Dynamic learning from adaptive neural control of robot manipulators with prescribed performance. IEEE Trans Syst Man Cybern-Syst 47(8):2244–2255
He SD, Dai SL, Fei L (2019) Asymptotic trajectory tracking control with guaranteed transient behavior for MSV with uncertain dynamics and external disturbances. IEEE Trans Ind Electron 66(5):3712–3720
Bu XW (2018) Air-breathing hypersonic vehicles funnel control using neural approximation of non-affine dynamics. IEEE-ASME Trans Mechatron 23(5):2099–2108
Bu XW (2017) A prescribed performance control approach guaranteeing small overshoot for air-breathing hypersonic vehicles via neural approximation. Aerosp Sci Technol 71:485–498
Liang H, Zhang Y, Huang T (2020) Prescribed performance cooperative control for multiagent systems with input quantization. IEEE Trans Cybern 50(5):1810–1819
Yin ZY, Suleman A, Luo JJ (2019) Appointed-time prescribed performance attitude tracking control via double performance functions. Aerosp Sci Technol 93:105337
Wei CS, Luo JJ, Dai HH (2019) Learning-based adaptive attitude control of spacecraft formation with guaranteed prescribed performance. IEEE Trans on Cybern 49(11):4004–4016
Bu XW, Wu XY, Huang JQ (2016) Minimal-learning-parameter based simplified adaptive neural back-stepping control of flexible air-breathing hypersonic vehicles without virtual controllers. Neurocomputing 175:816–825
Xi XY, Liu TZ, Zhao JF (2020) Output feedback fault-tolerant control for a class of nonlinear systems via dynamic gain and neural network. Neural Comput Appl 32(10):5517–5530
Zhang JJ (2019) State observer-based adaptive neural dynamic surface control for a class of uncertain nonlinear systems with input saturation using disturbance observer. Neural Comput Appl 31(9):4993–5004
Zerari N, Chemachema M (2019) Robust adaptive neural network prescribed performance control for uncertain CSTR system with input nonlinearities and external disturbance. Neural Comput Appl 1:1. https://doi.org/10.1007/s00521-019-04591-1
Sun JL, Pu ZQ, Yi JQ (2020) Fixed-time control with uncertainty and measurement noise suppression for hypersonic vehicles via augmented sliding mode observers. IEEE Trans Ind Inf 16(2):1192–1203
Tabuada P (2007) Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans Automat Control 52(9):1680–1685
Bolender M, Doman D (2007) Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle. J Spacecraft Rockets 44(2):374–387
Bu XW, Wu XY, Zhang R (2015) Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle. J Frankl Inst-Eng Appl Math 352(4):1739–1765
Liu L, Wang D, Peng ZH (2019) Bounded neural network control for target tracking of underactuated autonomous surface vehicles in the presence of uncertain target dynamics. IEEE Trans Neural Network Learn Syst 30(4):1241–1249
Shao XL, Wang HL (2016) Back-stepping robust trajectory linearization control for hypersonic reentry vehicle via novel tracking differentiator. Journal of the Franklin Institute-Engineering and Applies Mathematics 353(9):1957–1984
Keighobadi J, Hosseini-Pishrobat M (2020) Adaptive neural dynamic surface control of mechanical systems using integral terminal sliding mode. Neurocomputing 379:141–151
Song S, Zhang BY, Song XN (2019) Adaptive neuro-fuzzy backstepping dynamic surface control for uncertain fractional-order nonlinear systems. Neurocomputing 360:172–184
Wang X, Chen Z, Yuan Z (2003) Nonlinear tracking-differentiator with high speed in whole course. Control Theory Appl 20(6):875–878
An H, Guo Z, Wang G (2020) Low-complexity hypersonic flight control with asymmetric angle of attack constraint. Nonlinear Dyn 100:435–449
Acknowledgement
This research has been supported in part by National Natural Science Foundation of China under grant 61803348, National Nature Science Foundation of China as National Major Scientific Instruments Development Project under grant 61927807, State Key Laboratory of Deep Buried Target Damage under grant DXMBJJ2019-02, Scientific and Technological Innovation Programs of Higher Education Institutions in Shanxi under grant 2020L0266, Shanxi Province Science Foundation for Youths under grant 201701D221123, Youth AcademicNorth University of China under grant QX201803, Program for the Innovative Talents of Higher Education Institutions of Shanxi, and Shanxi ‘‘1331 Project’’ Key Subjects Construction (1331KSC).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shi, Y., Shao, X. Neural adaptive appointed-time control for flexible air-breathing hypersonic vehicles: an event-triggered case. Neural Comput & Applic 33, 9545–9563 (2021). https://doi.org/10.1007/s00521-021-05710-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-021-05710-7