
Abstract
This paper deals with the topology and weight evolution of Neuro-Controllers (NCs). It focuses on meta-problems of developing motion controllers that can operate successfully in several given motion-problems, where each of these motion problems defers by the arena and task. Here, the evolution aims to find both specialized and non-specialized controllers. The non-specialized controllers are evolved to provide a successful motion for the entire set of the given motion-problems, whereas each specialized controller is evolved to be optimal in at least one of these problems. The meta-problem is defined as a many-objective optimization problem, in which the kth objective is to maximize the motion performance in the kth motion problem. Following the problem description, a decomposition-based evolutionary algorithm, which is termed NEWS/D, is presented. This algorithm, which has recently been proposed by the authors, is specially designed to allow the topology and weight evolution of NCs under a large number of objectives. Next, the algorithm is applied to find NCs for three meta-problems, i.e., three sets of motion problems. The results of the experiments show that the obtained three sets of NCs include both specialized and non-specialized controllers. In addition, the proposed approach of many-objective topology and weight evolution of NCs is analyzed in comparison with other approaches, including three versions of decomposition-based fixed topology optimization. It is shown here that for the same number of evaluations, NEWS/D achieved better results than those of the other approaches. Finally, a topology analysis is carried out for the specialized NCs, which suggests that the solution includes multiple equivalent NCs. The numerical implications of this phenomenon are left for future work.









Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Bongard JC (2013) Evolutionary robotics: taking a biologically inspired approach to the design of autonomous, adaptive machines. Commun ACM 56(8):74–83. https://doi.org/10.1145/2493883
Doncieux S, Bredeche N, Mouret J-B, Eiben AE (2015) Evolutionary robotics: what, why, and where to. Front Robot AI 2:4. https://doi.org/10.3389/frobt.2015.00004
Zhou A, Qu BY, Li H, Zhao SZ, Suganthan PN, Zhang Q (2011) Multiobjective evolutionary algorithms: a survey of the state of the art. Swarm Evol Comput 1(1):32–49. https://doi.org/10.1016/j.swevo.2011.03.001
Li B, Li J, Tang K, Yao X (2015) Many-objective evolutionary algorithms: a survey. ACM Comput Surv 48(1):13
Trianni V, López-Ibánez M (2015) Advantages of task-specific multi-objective optimisation in evolutionary robotics. PLoS ONE 10(8):e0136406. https://doi.org/10.1371/journal.pone.0136406
Jin Y (2006) Multi-objective machine learning, vol. 16. Springer Science & Business Media
Zhou X, Qin AK, Gong M, Tan KC (2021) A survey on evolutionary construction of deep neural networks. IEEE Trans. Evol. Comput. https://doi.org/10.1109/TEVC.2021.3079985
Stanley KO, Miikkulainen R (2002) Evolving neural networks through augmenting topologies. Evol Comput 10(2):99–127. https://doi.org/10.1162/106365602320169811
Fieldsend JE, Singh S (2005) Pareto evolutionary neural networks. IEEE Trans Neural Netw 16(2):338–354. https://doi.org/10.1109/TNN.2004.841794
Goh CK, Teoh EJ, Tan KC (2008) Hybrid multiobjective evolutionary design for artificial neural networks. IEEE Trans Neural Netw 19(9):1531–1548. https://doi.org/10.1109/TNN.2008.2000444
Schrum J, Miikkulainen R (2016) Solving multiple isolated, interleaved, and blended tasks through modular neuroevolution. Evol Comput 24(3):459–490. https://doi.org/10.1162/EVCO_a_00181
Abramovich O, Moshaiov A (2016) Multi-objective topology and weight evolution of neuro-controllers. In: 2016 IEEE congress on evolutionary computation, CEC 2016, 2016, pp 670–677. https://doi.org/10.1109/CEC.2016.7743857
Nagar D, Furman A, Nitschke G (2019) The cost of complexity in robot bodies. In: 2019 IEEE congress on evolutionary computation, CEC 2019—proceedings, pp. 2713–2720. https://doi.org/10.1109/CEC.2019.8790084
Künzel S, Meyer-Nieberg S (2018) Evolving artificial neural networks for multi-objective tasks. In: Lecture notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics), 2018, vol. 10784 LNCS, pp 671–686. https://doi.org/10.1007/978-3-319-77538-8_45
Showalter I, Schwartz HM (2020) Neuromodulated multiobjective evolutionary neurocontrollers without speciation. Evol Intell. https://doi.org/10.1007/s12065-020-00394-9
Lu Z et al. (2019) NSGA-Net: neural architecture search using multi-objective genetic algorithm. In: GECCO 2019—Proceedings of the 2019 genetic and evolutionary computation conference, pp 419–427. https://doi.org/10.1145/3321707.3321729
Salih A, Moshaiov A (2021) Modified decomposition framework and algorithm for many-objective topology and weight evolution of neural networks. In: 2021 IEEE congress on evolutionary computation (CEC), pp 1478–1485. https://doi.org/10.1109/cec45853.2021.9504953
Shenfield A, Rostami S (2017) Multi-objective evolution of artificial neural networks in multi-class medical diagnosis problems with class imbalance. In: 2017 IEEE conference on computational intelligence in bioinformatics and computational biology, CIBCB 2017, pp. 1–8. https://doi.org/10.1109/CIBCB.2017.8058553
Li K, Wang R, Zhang T, Ishibuchi H (2018) Evolutionary many-objective optimization: a comparative study of the state-of-the-art. IEEE Access 6:26194–26214. https://doi.org/10.1109/ACCESS.2018.2832181
Zhang Q, Li H (2007) MOEA/D: a multiobjective evolutionary algorithm based on decomposition. IEEE Trans Evol Comput 11(6):712–731. https://doi.org/10.1109/TEVC.2007.892759
Trivedi A, Srinivasan D, Sanyal K, Ghosh A (2017) A survey of multiobjective evolutionary algorithms based on decomposition. IEEE Trans Evol Comput 21(3):440–462. https://doi.org/10.1109/TEVC.2016.2608507
Stanley KO, Clune J, Lehman J, Miikkulainen R (2019) Designing neural networks through neuroevolution. Nat Mach Intell 1(1):24–35. https://doi.org/10.1038/s42256-018-0006-z
Stanley KO, D’Ambrosio DB, Gauci J (2009) A hypercube-based encoding for evolving large-scale neural networks. Artif Life 15(2):185–212. https://doi.org/10.1162/artl.2009.15.2.15202
Abbass HA (2001) A memetic Pareto evolutionary approach to artificial neural networks. Lect Notes Comput Sci 2256:1–12. https://doi.org/10.1007/3-540-45656-2_1
Garcia-Pedrajas N, Hervas-Martinez C, Ortiz-Boyer D (2005) Cooperative coevolution of artificial neural network ensembles for pattern classification. IEEE Trans Evol Comput 9(3):271–302. https://doi.org/10.1109/TEVC.2005.844158
Giustolisi O, Simeone V (2006) Optimal design of artificial neural networks by a multi-objective strategy: groundwater level predictions. Hydrol Sci J 51(3):502–523. https://doi.org/10.1623/hysj.51.3.502
Nolfi S (1998) Evolutionary robotics: exploiting the full power of self-organization. Conn Sci 10(3–4):167–184. https://doi.org/10.1080/095400998116396
Nolfi S, Floreano D, Floreano DD (2000) Evolutionary robotics: the biology, intelligence, and technology of self-organizing machines. MIT Press
Doncieux S, Mouret JB, Bredéche N, Padois V (2011) Evolutionary robotics: exploring new horizons. Stud Comput Intell 341:3–25. https://doi.org/10.1007/978-3-642-18272-3_1
Nelson AL, Barlow GJ, Doitsidis L (2009) Fitness functions in evolutionary robotics: a survey and analysis. Rob Auton Syst 57(4):345–370. https://doi.org/10.1016/j.robot.2008.09.009
Risi S, Togelius J (2015) Neuroevolution in games: state of the art and open challenges. IEEE Trans Comput Intell AI Games. https://doi.org/10.1109/TCIAIG.2015.2494596
Taylor T et al (2016) WebAL comes of age: a review of the First 21 years of artificial life on the web. Artif Life 22(3):364–407. https://doi.org/10.1162/ARTL_a_00211
Jin Y, Meng Y (2011) Morphogenetic robotics: an emerging new field in developmental robotics. IEEE Trans Syst Man Cybern Part C Appl Rev 41(2):145–160, 2011. https://doi.org/10.1109/TSMCC.2010.2057424
Lehman J, Stanley KO (2011) Abandoning objectives: evolution through the search for novelty alone. Evol Comput 19(2):189–222. https://doi.org/10.1162/EVCO_a_00025
Pugh JK, Soros LB, Stanley KO (2016) Quality diversity: a new frontier for evolutionary computation. Front Robot AI 3:40. https://doi.org/10.3389/frobt.2016.00040
Lehman J, Risi S, D’Ambrosio D, Stanley KO (2013) Encouraging reactivity to create robust machines. Adapt Behav 21(6):484–500. https://doi.org/10.1177/1059712313487390
Coello CAC, Cortés NC (2005) Solving multiobjective optimization problems using an artificial immune system. Genet Program Evolv Mach 6(2):163–190. https://doi.org/10.1007/s10710-005-6164-x
Deb K, Pratap A, Agarwal S, Meyarivan T (2002) A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 6(2):182–197. https://doi.org/10.1109/4235.996017
Iantovics LB, Emmert-Streib F, Arik S (2017) MetrIntMeas a novel metric for measuring the intelligence of a swarm of cooperating agents. Cogn Syst Res 45:17–29. https://doi.org/10.1016/j.cogsys.2017.04.006
Iantovics LB (2021) Black-box-based mathematical modelling of machine intelligence measuring. Mathematics. https://doi.org/10.3390/math9060681
Shapiro SS, Wilk MB (1965) An analysis of variance test for normality (complete samples). Biometrika 52(3/4):591–611
Salih A, Moshaiov A (2022) Benchmarking many-objective topology and weight evolution of neural networks: a study with NEWS/D. In: 2021 IEEE symposium series on computational intelligence, SSCI 2021, pp 1–6. https://doi.org/10.1109/ssci50451.2021.9659924
Salih A, Moshaiov A (2017) Multi-objective neuro-evolution: Should the main reproduction mechanism be crossover or mutation? In: 2016 IEEE International conference on systems, man, and cybernetics, SMC 2016—conference proceedings, pp 4585–4590. https://doi.org/10.1109/SMC.2016.7844954
Acknowledgements
The first author would like to acknowledge the generous scholarship that was provided by the Israeli Ministry of Science & Technology; without it, this work could have not been realized.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
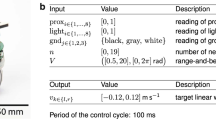
The robot’s model is a two-wheel-driven mobile robot as in [43]. Eight sensor modules have been simulated. Each module includes a single target range sensor and a single obstacle range sensor. The modules are equally spaced around the robot’s body. The sensor's characteristics are the same for all sensors of the same type. The maximum sensing range of the obstacle sensors is 5 cm with a beam width span of 6°. The maximum sensing range of the target sensors is 100 cm with a beam width span of 30°. The sensor's output is a value within the range [0, 1], where 1 is the value for objects located at the maximum sensing range (and beyond) and 0 is the value for touching the object. All the sensors are ideal with no sensor noise considered. The robot’s motion is defined as follows. At each control-time-step \({\Delta }t_{{{\text{step}}}}\), the robot’s controller receives signals from the simulated sensors as a real-numbered vector, \({\varvec{In}} \in {\mathbb{R}}^{16}\). Based on these signals, the controller generates motor commands, \({{\varvec{\Omega}}}^{{\text{T}}} = \left[ {\omega_{R} ,\omega_{L} } \right]^{T}\). These commands are applied as rotational velocity for the left (\(\omega_{L}\)) and the right (\(\omega_{R}\)) motors. During \({\Delta }t_{{{\text{step}}}}\), in each simulation-time-step, \({\text{d}}t \ll \Delta t_{{{\text{step}}}}\), the robot location is updated according to Eqs. (12) and (13).
where \(v_{x} \left( t \right)\) and \(v_{y} \left( t \right)\) are the robot's center horizontal and vertical velocity, respectively. Also, \(v_{\phi } \left( t \right)\) is the robot's angular velocity. \(R_{w}\) is the radius of the robot wheels, \(D_{R}\) is the distance between the robots’ wheels. \(\left[ {x\left( t \right),y\left( t \right)} \right]\) are the current horizontal and vertical coordinates of the robot in the motion-problem system, whereas \(\left[ {x\left( {t + {\text{d}}t} \right),y\left( {t + {\text{d}}t} \right)} \right]\) present the updated coordinates. \(\phi \left( t \right)\) presents the robot's orientation and \(\phi \left( {t + {\text{d}}t} \right)\) presents the updated orientation. Here, the orientation is defined by the angle between the robot axis and the horizontal axis of the motion-problem coordinate system. The parameters \({\Delta }t_{{{\text{step}}}} = 5,\;{\text{d}}t = 0.01,\;D_{R} = 5.5\;{\text{cm}},\;R_{w} = 1\;{\text{cm}}\) are used in this experimental study. Figure

Control schemes
10 provides a block diagram for the neuro-control scheme of the robot. It should be noted that the NC receives signals from the sensors without any pre-defined knowledge of the sensor type or the robot location.
Rights and permissions
About this article

Cite this article
Salih, A., Moshaiov, A. Evolving topology and weights of specialized and non-specialized neuro-controllers for robot motion in various environments. Neural Comput & Applic 34, 17071–17086 (2022). https://doi.org/10.1007/s00521-022-07357-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07357-4