
Abstract
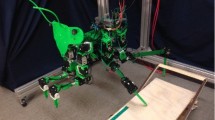
This article introduces a multi locomotion robot, MLR III, which has multiple locomotion types, i.e., not only brachiating but also walking. Conventionally we have studied dexterous locomotion robots and their controller design. One is a simplified two-link robot, Brachiator II. This is an example of an underactuated system in which a robot mechanism has more degrees of freedom than actuators. The desired motions are encoded as the output of a target dynamical system inspired by the pendulum-link motion of an ape’s brachiation. The other is a monkey-type robot, Brachiator III. Brachiator III achieves a dexterous motion using redundant degrees of freedom. The motion is generated in an empirical learning process on an intelligent structure, on which the learning algorithm coordinates some primitive motions to generate the desired motion. MLR III is an extended locomotion robot that has multiple types of locomotions: brachiation, bipedal walking, and quadrupedal walking, similar to a monkey or gorilla. This article introduces the mechanism and controller design for brachiating motion.
Similar content being viewed by others


References
Albus JS (1991) Outline for a theory of intelligence. IEEE Trans Systems Man Cybernetics 21:473–509
Simons EL (1972) Primate evolution: An introduction to man’s place in nature. Macmillan, New York
Saito F, Fukuda T, Arai F (1994) Swing and locomotion control for a two-link brachiation robot. IEEE Control Systems Mag 14:5–12
Saito F (1995) Motion control of the brachiation type of mobile robot (in Japanese). PhD thesis, Nagoya University
Lynch KM, Mason MT (1999) Dynamic nonprehensile manipulation: Controllability, planning and experiments. Int J Robotics Res 18:64–92
Hasegawa Y, Fukuda T, Shimojima K (1999) Self-scaling reinforcement learning for fuzzy logic controller-Applications to motion control of a two-link brachiation Robot. IEEE Trans Ind Electron 46:1123–1131
Saito F, Fukuda T (1996) First results of Brachiator III - A new brachiation robot modeled on a siamang. ALIFE 5:321–328
Fukuda T, Hosokai H, Kondo Y (1991) Brachiation type of mobile robot. In: Proceedings of the IEEE International Conference on Advanced Robotics, pp 915–920
Spong MW (1994) Swing-up control of the Acrobot. In: Proceedings of the 1994 IEEE International Conference on Robotics and Automation, pp 2356–2361
Saito F, Fukuda T, Arai F (1994) Swing and locomotion control for a two-link brachiation robot. IEEE Control Systems 14:5–12
Fukuda T, Saito F, Arai F (1991) A Study on the brachiation type of mobile robot (heuristic creation of driving input and control using CMAC). In: Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, pp 478–483
Nakanishi J, Fukuda T, Koditschek DE (2000) A brachiation robot controller, IEEE Trans Robotics Automation. 16:109–123
Nakanishi J, Fukuda T (2000) A leaping maneuver for brachiating robots. In: Proceedings of the 2000 IEEE International Conference on Robotics and Automation (ICRA ’00). pp 2822–2827
Hasegawa Y, Fukuda T (1999) Learning method for hierarchical behavior controller. In: IEEE International Conference on Robotics and Automation, pp 2799–2804
Hasegawa Y, Ito Y, Fukuda T (2000) Behavior coordination and its modification on brachiation-type mobile robots. In: IEEE International Conference on Robotics and Automation, pp 3984–3989
Saito F, Fukuda T (1996) A multi-link brachiation robot. IEEE International Conference on Robotics and Automation, Conference Video Proceedings
Doi M, Hasegawa Y, Fukuda T (2004) Passive trajectory control of the lateral motion in bipedal walking. In: IEEE International Conference on Robotics and Automation, pp 3049–3054
Kajima H, Hasegawa Y, Fukuda T (2002) Study on brachiation controller - Adjustment method of strength and timing parameters. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 2497–2502
Kajima H, Doi M, Hasegawa Y, et al. (2003) Study on brachiation controller for the multilocomotion robot - Redesigning behavior controllers. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1388–1393
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented, in part, at the 8th International Symposium on Artificial Life and Robitics, Oita, Japan, January 24–26, 2003
About this article
Cite this article
Fukuda, T., Kajima, H. & Hasegawa, Y. Intelligent robots as artificial living creatures. Artif Life Robotics 8, 101–110 (2004). https://doi.org/10.1007/s10015-004-0316-6
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/s10015-004-0316-6