
Abstract
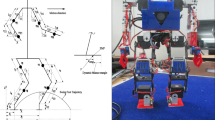
The application of the hybrid self-organizing fuzzy (SOF) PID controller to a multiinput multioutput nonlinear biped robot is studied in this article. The SOF-PID controller was initially studied by H.B. Kazemian in 1998. Actually, his SOF-PID controller has limits. The supervisory capacity of the SOF-PID controller can adjust only certain kinds of parameters. Here the hybrid SOF-PID controller is introduced to tune some kinds of parameters, and it was tested on a MIMO biped robot. In the experiment, the hybrid SOF-PID controller shows a better performance than the SOF-PID.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
HB Kazemian (2002) ArticleTitleThe SOF-PID controller for the control of a MIMO robot arm IEEE Trans Fuzzy Syst 10 523–532 Occurrence Handle10.1109/TFUZZ.2002.800658
HB Kazemian (2001) ArticleTitleComparative study of a learning fuzzy PID controller and a self-tuning controller ISA Trans 40 245–253 Occurrence Handle10.1016/S0019-0578(00)00056-2
Kazemian HB (1998) The self-organizing fuzzy PID controller. Proceedings of the IEEE World Congress on Computational Intelligence, Anchorage, May 1998, pp 319–324
RK Mudi NR Pal (1999) ArticleTitleA robust self-tuning scheme for PI- and PD-type fuzzy controllers IEEE Trans Fuzzy Syst 7 2–16 Occurrence Handle10.1109/91.746295
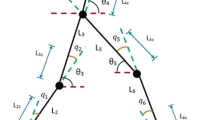
F Plestan (2003) ArticleTitleStable walking of a 7-DOF biped robot IEEE Trans Robot Autom 19 653–668 Occurrence Handle10.1109/TRA.2003.814514
Tang Z (2003) Trajectory planning for smooth transition of a biped robot. Proceedings of the IEEE International Conference on Robotics and Automation, Taiped, Taiwan, September 2003, pp 2455–2460
D Ito (2002) An approach to generation of smooth walking pattern for biped robot AMC Maribor, Slovenia 98–103
T Furuta (2001) ArticleTitleDesign and construction of a series of compact humanoid robots and development of biped walk control strategies Robot Auton Syst 37 81–100 Occurrence Handle1016.68119 Occurrence Handle10.1016/S0921-8890(01)00151-8
GF Franklin JD Powell (1990) Digital control of dynamic systems Addison-Wesley Reading
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 10th International Symposium on Artificial Life and Robotics, Oita, Japan, February 4–6, 2005
About this article
Cite this article
Choi, TY., Park, SY. & Lee, JJ. A hybrid SOF-PID controller for a MIMO biped robot. Artif Life Robotics 10, 69–72 (2006). https://doi.org/10.1007/s10015-005-0357-5
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/s10015-005-0357-5