
Abstract
We have proposed continuous and discrete time resolved acceleration control methods for underwater vehicle-manipulator systems and the effectiveness of the control methods have been shown by experiments. In this paper, we propose a digital type disturbance compensation control method based on the RAC method considering singular configuration of manipulator. Experimental results show the effectiveness of the proposed method.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Abbreviations
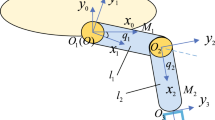
- Σ U :
-
inertial coordinate frame
- Σ i :
-
link i coordinate frame (i = 0, 1, 2; link 0 means base)
- U R i :
-
coordinate transformation matrix from Σ i to Σ U
- p e :
-
position vector of end-tip of manipulator with respect to Σ U
- p 0 :
-
position vector of origin of Σ0 with respect to Σ U
- v i :
-
linear velocity vector of Σ i with respect to Σ U
- ω i :
-
angular velocity vector of Σ i with respect to Σ U
- ϕ i :
-
relative angle of joint i
- x 0 :
-
position and attitude vector of Σ0 with respect to Σ U (= [p T0 ϕ 0]T)
- ϕ :
-
relative joint angle vector (= [ϕ1 ϕ2]T)
- m i :
-
mass of link i
- l i :
-
length of link i
- V i :
-
volume of link i
- D i :
-
width of link i
- \( C_{D_i } \) :
-
drag coefficient of link i
- ρ :
-
fluid density
- a i :
-
position vector from joint i to center of gravity of link i with respect to Σ U
- b i :
-
position vector from joint i to center of buoyancy of link i with respect to Σ U
- E :
-
identity matrix
- g :
-
gravitational acceleration vector
- F j :
-
thruster force (j = 1, 2, 3)
- R :
-
length form origin of Σ0 to thruster
References
Maheshi H, Yuh J, Lakshmi R (1991) A coordinated control of an underwater vehicle and robotic manipulator. J Robotic Syst 8:339–370
McLain TW, Rock SM, Lee MJ (1996) Experiments in the coordinated control of an underwater arm/vehicle system. Auton Robots 3:213–232
Tarn TJ, Shoults GA, Yang SP (1996) A dynamic model of an underwater vehicle with a robotic manipulator. Auton Robots 3:269–283
Antonelli G, Chiaverini S (1998) Task-priority redundancy resolution for underwater vehicle-manipulator systems. In: Proceedings of the 1998 IEEE ICRA, pp 768–773
Mclain TW, Rock SM (1998) Development and experimental validation of an underwater manipulator hydrodynamic model. Int J Robotics Res 17:748–759
Antonelli G, Caccavale F, Chiaverini S, et al (2000) Tracking control for underwater vehicle-manipulator systems with velocity estimation. IEEE J Oceanic Eng 25:399–413
Sarkar N, Podder TK (2001) Coordinated motion planning and control of autonomous underwater vehicle-manipulator systems subject to drag optimization. IEEE J Oceanic Eng 26:228–239
Antonelli G (2003) Underwater robots: motion and force control of vehicle-manipulator systems. Springer
Sagara S (2003) Digital control of an underwater robot with vertical planar 2-link manipulator. In: Proceedings of the 8th AROB, pp 524–527
Sagara S, Shibuya K, Tamura M (2004) Experiment of digital RAC for an underwater robot with vertical planar 2-link manipulator. In: Proceedings of the 9th AROB, pp 337–340
Yatoh T, Sagara S, Tamura M (2006) RAC for underwater vehicle-manipulator systems using dynamic equation. In: Proceedings of the 11th AROB, pp 233–236
Sagara S, Tamura M, Yatoh T, Shibuya K (2006) Digital RAC for underwater vehicle-manipulator systems considering singular configuration. Artif Life Robotics 10:106–111
Fossen TI (1995) Guidance and Control of Ocean Vehicles. John Wiley & Sons, pp 431–452
Levesque B, Richard MJ (1994) Dynamic analysis of a manipulator in a fluid environment. Int J Robot Res 13:221–231
Godler I, Honda H, Ohinishi K (2002) Design guidelines for disturbance observer’s filter in discrete time. In: Proceedings of 7th International Workshop on Advanced Motion Control, pp 390–395
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 12th International Symposium on Artificial Life and Robotics, Oita, Japan, January 25–27, 2007
About this article
Cite this article
Yatoh, T., Sagara, S. & Tamura, M. Digital type disturbance compensation control of a floating underwater robot with 2 link manipulator. Artif Life Robotics 13, 377–381 (2008). https://doi.org/10.1007/s10015-008-0585-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-008-0585-6