
Abstract
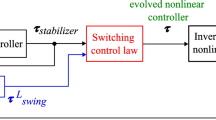
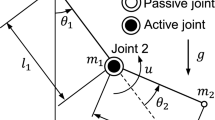
We present a control method for a 3-DOF acrobot which is a model of a gymnast on a horizontal bar with three links, two active joints, and a passive joint. This robot is a nonholonomic and underactuated system. We propose two control methods for the 3-DOF acrobot. First, swing-up control is performed by genetic programming (GP), and stabilizing control is handled by a linear quadratic regulator (LQR). GP can search widely for the optimum input torques for swing-up so that the acrobot is able to reach a near balancing point. The LQR is then switched on to stabilize the system. In the simulation results, the 3-DOF acrobot could swing up to the desired position, and the proposed method could control the acrobot effectively.
Similar content being viewed by others
Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.References
Spong MW (1995) The swing-up control problem for the acrobot. IEEE Control Syst Mag 15(2):49–55
Kawada K, Fujisawa S, Obika M, et al (2005) Creating swing-up patterns of an acrobot using evolutionary computation. Proceedings of the 2005 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Espoo, Finland, pp 261–266
Xin X, Kaneda M (2007) Swinging-up control for a 3-DOF gymnastic robot with a passive first joint: design and analysis. IEEE Trans Robotics 23:1277–1285
Watabe T, Ymakita M, Mita T (2002) Stabilization of a 3-link acrobat robot in an upright position. Proceedings of the SICE Annual Conference 2002 in Osaka (SICE2002), Osaka, Japan, pp 2996–3001
Koza J (1992) Genetic programming: on the programming of computers by means of natural selection. MIT Press, Cambridge
Ogawa T, Oshiro N, Kinjo H (2008) Backward movement control with a two-trailer truck system using genetic programming. Proceedings of the 13th International Symposium on Artificial Life and Robotics, Oita, Japan, pp 597–600
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 14th International Symposium on Artificial Life and Robotics, Oita, Japan, February 5–7, 2009
About this article
Cite this article
Fukushima, R., Uezato, E. Swing-up control of a 3-DOF acrobot using an evolutionary approach. Artif Life Robotics 14, 160–163 (2009). https://doi.org/10.1007/s10015-009-0645-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-009-0645-6