
Abstract
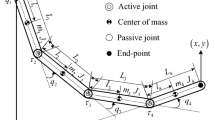
Recently, computational intelligence has been applied extensively in control engineering, especially for systems that cannot easily be controlled by conventional means. In this article, attention is paid to the control of a three-DOF planar underactuated manipulator, also known as the three-link gymnastic robot, by utilizing a neural network (NN) and a genetic algorithm (GA). In an attempt to make the problem more analogous to human gymnastics, constraints are applied to the joint angles. With different swing-up timings, the performance of the proposed controller is investigated and control simulations are performed. Numerical simulations show that the neurocontroller is able to control the system effectively within the constraints and given timings.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Spong MW (1998) Underactuated mechanical systems. In: Siciliano B, Valavanis KP (eds) Control problems in robotics and automation. LNCIS, vol 230, Springer, London, pp 135–150
Spong MW (1995) The swing-up control problem for the acrobot. IEEE Control Syst Mag 15:49–55
Spong MW (2000) Some aspects of switching control in robot locomotion. at-Automatisierungs Technik, Oldenbourg, vol 4, pp 157–164
Saito F, Fukuda T, Arai F (1993) Swing and locomotion control for two-link brachiation robot. Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, IEEE Press, Piscataway, NJ, USA, pp 719–724
Boone G (1997) Efficient reinforcement learning: model-based acrobot control. IEEE International Conference on Robotics and Automation, IEEE Press, Piscataway, NJ, vol 1, pp 229–234
Yoshimoto J, Nishimura M, Tokida Y, et al (2005) Acrobot Control by learning the switching of multiple controllers. Artif Life Robotics 9:67–71
Brown SC, Passino KM (1997) Intelligent control for an acrobot. J Intell Syst 18:209–248
Kawada K, Obika M, Fujisawa S, et al (2005) Creating swing-up patterns of an acrobot using evolutionary computation (in Japanese). IEEJ Trans EIS 125(3):457–462
Duong SC, Kinjo H, Uezato E, et al (2008) A switch controller design for the Acrobot using neural network and genetic algorithm. Proceedings of the 10th IEEE International Conference on Control, Automation, Robotics and Vision, ICARCV-2008, Vietnam, IEEE Press, Piscataway, NJ, pp 1540–1544
Duong SC, Kinjo H, Uezato E, et al (2009) On the continuous control of the Acrobot via computational intelligence. In: Chen BC, et al (eds) IEA/AIE 2009 Lecture Notes in Artificial Intelligence, LNAI 5579, Springer, Berlin, pp 231–241
Michitsuji Y, Sato H, Yamakita M (2001) Giant swing via forward upward circling of the Acrobat robot. Proceedings of the American Control Conference, Arlington, vol 4, IEEE Press, Piscataway, NJ, pp 3262–3267
Takashima S (1991) Control of gymnast on a high bar. Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, IEEE Press, Piscataway, NJ, pp 1423–1429
Suzuki K, Kawai N, Miyamoto T, et al (1996) Mechanics of kip motion (in Japanese). Trans Jpn Soc Mech Eng (JSME) — C, 62(602):3979–3984
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 14th International Symposium on Artificial Life and Robotics, Oita, Japan, February 5–7, 2009
About this article
Cite this article
Duong, S.C., Kinjo, H., Uezato, E. et al. Intelligent control of a three-DOF planar underactuated manipulator. Artif Life Robotics 14, 284 (2009). https://doi.org/10.1007/s10015-009-0674-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10015-009-0674-1