
Abstract
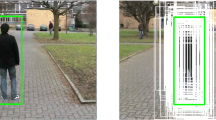
In this article, we present a new algorithm to track a moving object based on color information employing a particle filter algorithm. Recently, a particle filter has been proven very successful for nonlinear and non-Gaussian estimation problems. It approximates a posterior probability density of the state, such as the object position, by using samples which are called particles. The probability distribution of the state of the tracked object is approximated by a set of particles, where each state is denoted as the hypothetical state of the tracked object and its weight. The particles are propagated according to a state space model. Here, the state is treated as the position of the object. The weight is considered as the likelihood of each particle. For this likelihood, we consider the similarity between the color histogram of the tracked object and the region around the position of each particle. The Bhattacharya distance is used to measure this similarity. Finally, the mean state of the particles is treated as the estimated position of the object. Experiments were performed to confirm the effectiveness of this method to track a moving object.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Isard M, Blake A (1998) Condensation: conditional density propagation for visual tracking. Int J Comput Vision 29:5–28
Kitagawa G (1996) Monte Carlo filter is smoother for non-Gaussian nonlinear state space models. J Comput Graphic Stat 5:1–25
Gordon NJ, Salmon DJ, Smith AFM (1993) Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc Radar Signal Process 140:107–113
Li P, Zhang T (2003) Visual contour tracking based on particle filters. Image Vision Comput 21:111–123
McKenna S, Raja Y, Gong S (1999) Tracking color objects using adaptive mixture models. Image Vision Comput 17:225–231
Olson T, Brill F (1997) Moving object detection and event recognition algorithm for smart cameras. Proceedings of the DARPA Image Understanding Workshop, Elsevier, California, pp 159–175
Isard M, McCormick J (2001) A Bayesian multiple-blob tracker. International Conference on Computer Vision, vol 2, IEEE, Vancouver, pp 34–41
Nummiaro K, Koller E, Gool LV (2003) An adaptive color-based particle filter. Image Vision Comput 21:99–110
Perez P, Hue C, Vermaak J, et al (2002) Color-based probabilistic tracking, Proceedings of the 7th European Conference on Computer Vision, Springer, London, pp 661–675
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 14th International Symposium on Artificial Life and Robotics, Oita, Japan, February 5–7, 2009
About this article
Cite this article
Sugandi, B., Kim, H., Tan, J.K. et al. A moving object tracking based on color information employing a particle filter algorithm. Artif Life Robotics 14, 39–42 (2009). https://doi.org/10.1007/s10015-009-0718-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-009-0718-6