
Abstract
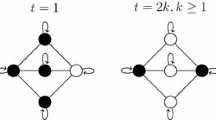
We introduce sparse encoding into the autoassociative memory model with replacement units. Utilizing computer simulation, we search the optimal number of replacement units in two terms: the memory capacity and the information capacity of the network. We show that the optimal number of replacement units to maximize the memory capacity and the information capacity decreases as the firing ratio decreases, and that the difference in the memory capacity between sparse encoding and non-sparse encoding becomes small as the number of replacement units increases.
Similar content being viewed by others

References
Rolls ET (1987) Information representation, processing, and storage in the brain: analysis at the single neuron level. In: Changeux J-P, Konishi M (eds) The neural and molecular bases of learning, pp 503–539
Amari S (1989) Characteristics of sparsely encoded associative memory. Neural Networks 2:451–457
Amit DJ, Gutfreud H, Sompolinsky H (1985) Spun-glass models of neural networks. Phys Rev A2:1007–1018
Eriksson PS, Perfilieva E, Bjork-Eriksson T, et al (1998) Neurogenesis in the adult human hippocampus. Nat Med 4(11):1313–1317
Date A, Kurata K (2008) A property of neural networks of associative memory models with replacing units. Artif Life Robotics 12:291–294
Aonishi T, Komatsu Y, Kurata K (2010) Self-consistent signal-tonoise analysis of Hopfield model with unit replacement. Neural Networks. doi: 10.1016/j.neunet.2010.06.006
Okada M, Mimura K, Kurata K (1994) Associative memory with forgetting process: analysis by statistical neurodynamics (in Japanese). IEICE D-II J77-D-II pp 1178–1180
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part and was awarded the Young Author Award at the 15th International Symposium on Artificial Life and Robotics, Oita, Japan, February 4–6, 2010
About this article
Cite this article
Miyata, R., Muta, S. & Kurata, K. Memory capacity and information capacity of sparsely encoded associative memory with replacement units. Artif Life Robotics 15, 291–295 (2010). https://doi.org/10.1007/s10015-010-0807-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-010-0807-6