
Abstract
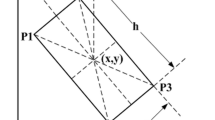
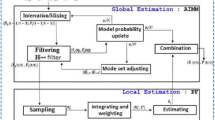
Recently, many approaches to applying a particle filter to a visual tracking problem have been proposed. However, it is hard to implement such a filter in a real-time system because it requires a great deal of computation time and considerable resources to achieve a high accuracy. In order to overcome this difficulty, especially the computation time, Shan and other workers have proposed combining a particle filter and mean shift in order to maintain the accuracy with a small number of particles. In their approach, the state of each particle moves to the point in the window with the highest likelihood value. It is known that the accuracy of an estimation depends on the size of the window, but a larger window size makes the computation slower. In this article, we propose a method for exploring the highest likelihood more quickly by means of random sampling. Moreover, the likelihood is also modified in terms not only of color cues, but also of motion cues for a greater accuracy in object tracking. The effectiveness of the proposed method is evaluated by real image sequence experiments.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Kitagawa G (1996) Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J Comput Graphical Stat 5(1):1–25
Isard M (1998) Condensation: conditional density propagation for visual tracking. Int J Comput Vision 29(1):5–28
Shan C, Wei Y, Ojardias F (2004) Real-time hand tracking by combining particle filtering and mean shift. Proceedings of the 6th International Conference on Automatic Faces and Gesture Recognition, pp 669–674
Yang C, Duraiswami R, Davis L (2005) Efficient mean-shift tracking via a new similarity measure. Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, pp 176–183
Nummiaro K (2001) An adaptive color-based particle filter. Image Vision Comput 21:99–110
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 15th International Symposium on Artificial Life and Robotics, Oita, Japan, February 4–6, 201
About this article
Cite this article
Nakagama, Y., Yokomichi, M. An improvement in MSEPF for visual tracking. Artif Life Robotics 15, 534–538 (2010). https://doi.org/10.1007/s10015-010-0862-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-010-0862-z