
Abstract
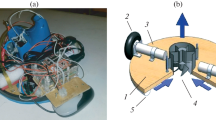
This article is concerned with the control of wheeled mobile robots (WMRs) using a modified variable structure theory. First, we introduce the dynamic characteristics of a WMR. Second, conventional variable structure control is reviewed. In order to considerably improve the transient response during the reaching phase, a modified variable structure control is proposed. The validity of the proposed variable structure theory is verified by means of a simulation test on a home-made wheeled mobile vehicle. The simulation results validate the superiority and practicality of the modified variable structure for WMRs.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Bloach AM, Drakunov S (1996) Stabilization and tracking in the nonholonomic integrator via sliding modes. Syst Control Lett 29(2):91–99
Kim DH, Oh TH (1999) Tracking control of a two-wheeled mobile robot using input-output linearization. Control Eng Practice 7:369–373
Jiang ZP, Nijmeijev H (1999) A recursive technique for tracking control of a nonholonomic system in chained form. IEEE Trans Autom Control 44(2):265–279
Do KD, Jiang ZP, Pan J (2004) Simultaneous tracking and stabilization of mobile robots: an adaptive approach IEEE Trans Autom Control 49(7):1147–1152
Hu Z, Li Z, Bicker R, et al (2004) Robust output tracking control of nonholonomic mobile robots via higher order sliding mode. Nonlinear Stud 11:23–35
Barbashin EA, Geraschenko EI (1965) On speeding up sliding modes in automatic control systems (in Russian). Differentzialniye Uravneniya 1:25–32
Utkin UI (1992) Sliding modes in control and optimization. Springer
SV Emelyanov (1985) Binary control systems. International Research Institute for Management Sciences, vol 1
Slotine JJ, Li E, Li W (1991) Applied nonlinear control. Prentice-Hall, Englewood Cliffs
Utkin VI (1997) Survey paper-variable structure systems with sliding modes. IEEE Trans Autom Control 22(2):212–222
Baik IC, Kim KH, Kim HS, et al (1996) Robust nonlinear speed control of PM synchronous motor using boundary layer integral sliding control with sliding load torque observer. IEEE PESC’96 Record, pp 1242–1247
Lee JH, Ko JS, Chun SK, et al (1992) Design of continuous sliding mode controller for BLDDM with prescribed tracking performance. Conference Record, IEEE PESC’92, pp 770–775
Chern TL, Wu YC (1993) Design of brushless DC position servo systems using integral variable structure approach. IEE Proc Elec Power Appl 140:27–34
Gao W, Hung JC (1993) Variable structure control of nonlinear systems: a new approach. IEEE Trans Indust Elec 40:45–55
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 16th International Symposium on Artificial Life and Robotics, Oita, Japan, January 27–29, 2011
About this article
Cite this article
Wang, CC. A novel variable structure theory applied in design for wheeled mobile robots. Artif Life Robotics 16, 378–382 (2011). https://doi.org/10.1007/s10015-011-0955-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-011-0955-3