
Abstract
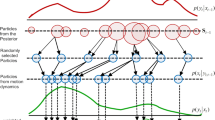
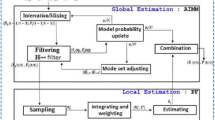
Recently, particle filter has been applied to many visual tracking problems and it has been modified in order to reduce the computation time or memory usage. One of them is the Mean-Shift embedded particle filter (MSEPF, for short) and it is further modified as Randomized MSEPF. These methods can decrease the number of the particles without the loss of tracking accuracy. However, the accuracy may depend on the definition of the likelihood function (observation model) and of the prediction model. In this paper, the authors propose an extension of these models in order to increase the tracking accuracy. Furthermore, the expansion resetting method, which was proposed for mobile robot localization, and the changing the size of the window in Mean-Shift search are also selectively applied in order to treat the occlusion or rapid change of the movement.





Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Kitagawa G (1996) Monte–Carlo filter and smoother for non-Gaussian nonlinear state space models. J Comput Graphical Stat 5(1):1–25
Gordon NJ, Salmond D, Smith AFM (1993) Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEEE Proc F 140(2):107–113
Isard M, Blake A (1998) CONDENSATION: conditional density propagation for visual tracking. Int J Comput Vis 29(1):5–28
Shan C, Wei Y, Tan T, Ojardias F (2004) Real time hand tracking by combining particle filter and mean shift. In: Proceedings of 6th IEEE international conference of automatic face and gesture recognition, pp 669–674
Nakagama Y, Yokomichi M (2011) An improvement of MSEPF for visual tracking. Int J Artif Life Robot 15(4):534–538
Boers Y, Driessen JN (2003) Interacting multiple model particle filter. IEEE Proc Radar Sonar Navig 150(5):344–349
Wang J, Zhao D, Gao W, Shan S (2004) Interacting multiple model particle filter to adaptive visual tracking. In: Proceedings of international conference on image and graphics, pp 568–571
Ueda R, Arai T, Sakamoto K, Kikuchi T, Kamiya S (2004) Expansion resetting for recovery from fatal error in Monte Carlo localization—comparison with sensor resetting methods. In: Proceedings of International Conference on Intelligent Robots and Systems (IROS) 2004, vol 3, pp 2481–2486
Yang C et al (2005) Efficient Mean-Shift tracking via a new similarity measure. In: Proceedings of IEEE computer society conference on computer vision and pattern recognition (CVPR’05), vol 1, pp 176–183
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Yokomichi, M., Nakagama, Y. Multimodal MSEPF for visual tracking. Artif Life Robotics 17, 257–262 (2012). https://doi.org/10.1007/s10015-012-0050-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-012-0050-4