
Abstract
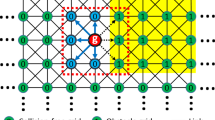
A problem related to energy consumption of a mobile robot involves finding out what route the robot can take that uses the least energy. An ant colony optimization algorithm (ACO) can solve this problem. However, it is applicable only for route on a flat terrain. This paper proposes an adapted ant colony optimization (adapted ACO) algorithm that is applicable for route on a rough terrain as well. This adaptation introduces a weight that is the energy expended on a route that may have upward slopes, downward slopes, and flat surfaces. Experiments were conducted to test the algorithm. The experimental results show that our adapted ACO did successfully find a route that expended the least energy, though it was not the shortest one. We also found the following interesting facts: an energy-efficient route has more downward slopes than upward ones; the energy expended increases with the steepness of the slopes along a route; and the energy expended is likely to be lower if the robot’s velocity is not constrained to be constant throughout the route.




Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Hlaing ZCSSM, Khine A (2011) An ant colony optimization algorithm for solving traveling salesman problem. Intern Conf Inf Commun Manag 2011:54–59
Gambardella LM, Dorigo M (1999) Ant-Q: a reinforcement learning to the traveling salesman problem. International Conference on Machine Learning (12th), Tahoe City, pp 252–260
Gambardella LM, Dorigo M (1996) Solving symmetric and asymmetric tsps by ant colonies. IEEE Conf Evol Comput, pp 622–627
Cong YZ, Ponnambalam SG (2009) Mobile robot path planning using ant colony optimization. IEEE/ASME Intern Conf Adv Intell Mechatron, pp 851–856
Chang HJ, Lee CSG, Lu YH, Hu YC (2004) Energy-time-efficient adaptive dispatching algorithms for ant-like robot systems. IEEE Intern Conf Robot Autom, pp 3294–3299
Wongwirat O, Anuntachai A (2011) Searching Energy-Efficient Route for Mobile Robot with Ant Algorithm. Intern Conf Control, Autom Syst, Korea, pp 1072–1075
Anuntachai A, Wongwirat O (2012) Searching energy-efficient route in rough terrain for mobile robot with ant algorithm. Intern Conf Intell Robot Appl, Canada, pp 194–204
Mei Y, Lu YH, Hu YC, Lee CSG (2006) Deployment of mobile robot with energy and timing constraints. IEEE Trans Rob 22(3):507–522
Artit S (2009) Computational intelligence.Thailand: Nakronrajchasrima, Suranaree U., ch7, pp 165–169
Dorigo M, Birattari M, Stutzle T (2006) Ant colony optimization: artificial ant as a computational intelligence technique. University Libre De Bruxelles, IRIDIA Technical report Series, Belgium
Dorigo M (1996) The ant system: optimization by a colony of cooperating agents. IEEE Trans Syst Man Cybern B Cybern 26(2):1–13
Yoshikawa M, Nagura T (2009) Adaptive ant colony optimization considering intensification and diversification. Intern MultiConf Eng Comp Sci 1:200–203
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Anuntachai, A., Wongwirat, O. & Thammano, A. An application of ant algorithm for searching energy-efficient route a mobile robot takes using energy as a weighting factor. Artif Life Robotics 19, 354–362 (2014). https://doi.org/10.1007/s10015-014-0175-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-014-0175-8