
Abstract
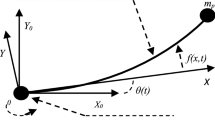
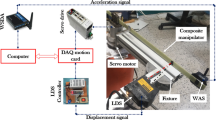
The purposes of this research are to derive the equations of motion of a flexible single-link system by a finite-element method, to develop the computational codes in order to perform dynamics simulations with vibration control and to propose an effective control scheme of a flexible single-link manipulator using two control strategies, namely proportional-derivative (PD) and active-force (AF) controls. The flexible manipulator used in this paper consists of an aluminum beam as a flexible link, a clamp-part, a servo motor to rotate the link, and a piezoelectric actuator to control vibration. Computational codes on time history responses, FFT (Fast Fourier Transform) processing, and eigenvalues–eigenvectors analysis were developed to calculate the dynamic behavior of the link. Furthermore, the PD and AF control strategies were designed and compared their performances through the calculations. The calculated results show the superiority of the proposed AF control comparing the PD one to suppress the vibration of the flexible single-link manipulator.









Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Nishidome C, Kajiwara I (2003) Motion and vibration control of flexible-link mechanism with smart structure. JSME Int J 46(2):565–571
Yaman Y et al (2001) Active vibration control of a smart beam. In: Proceedings of the 2001 CANSMART symposium, 2001, pp 125–134
Kircali OF et al (2009) Active vibration control of a smart beam by using a spatial approach. In: New Developments in Robotics, Automation and Control, Chap 21. In Tech, pp 378–410
Zhang J et al (2010) Active vibration control of piezoelectric intelligent structures. J Comput 5(3):401–409
Hewit JR et al (1997) Active force control of a flexible manipulator by distal feedback. Mech Mach Theory 32(5):583–596
Tavakolpour AR et al (2011) Modeling and simulation of a novel active vibration control system for a flexible structures. WSEAS Trans Syst Control 6:184–195
Tavakolpour AR, Mailah M (2012) Control of resonance phenomenon in flexible structures via active support. J Sound Vib 331:3451–3465
Muhammad AK et al (2014) Computer simulations on vibration control of a flexible single-link manipulator using finite-element method. In: Proceeding of 19th International Symposium of Artificial Life and Robotics. pp 381–386
Lalanne M et al (1983) Mechanical Vibration for Engineers. Wiley, New York
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 19th International Symposium on Artificial Life and Robotics, Beppu, Oita, January 22-24, 2014.
About this article

Cite this article
Muhammad, A.K., Okamoto, S. & Lee, J.H. Comparison of proportional-derivative and active-force controls on vibration of a flexible single-link manipulator using finite-element method. Artif Life Robotics 19, 375–381 (2014). https://doi.org/10.1007/s10015-014-0186-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-014-0186-5