
Abstract
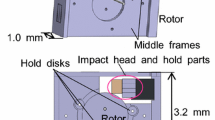
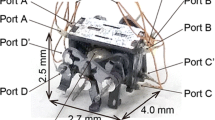
This paper presented a driving circuit which can output a driving waveform of the piezoelectric element impact-type actuator. The piezoelectric element impact-type actuator generates the rotational movement which is necessary to move the legs of the micro electro mechanical systems (MEMS) microrobot. The MEMS microrobot is made from silicon wafers fabricated by micro fabrication technology. The size of the fabricated MEMS microrobot is 4.0 mm × 4.6 mm × 3.6 mm. The driving circuit consists of a bare chip IC of the pulse-type hardware neuron model (P-HNM) and a peripheral circuit. P-HNM is an electrical oscillating model which has the same basic features of biological neurons. Therefore, P-HNM can output the driving waveform of the piezoelectric element impact-type actuator using electrical oscillation as biological neuron. As a result, we showed that the driving circuit can output the driving waveform of the piezoelectric element impact-type actuator without using any software programs or analog digital converters.













Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Shibata T, Aoki Y, Otsuka M et al (1997) Microwave energy transmission system for microrobot. IEICE Trans Electronics 80(2):303–308
Habib MK, Watanabe K, Izumi K (2007) Biomimetcs robot: from bio-inspiration to implementation. In: Proceedings of 33rd Annual Conference of the IEEE Industrial Electronics Society, pp143–148
Edqvist E, Snis N, Mohr RC et al (2009) Evaluation of building technology for mass producible millimeter-sized robots using flexible rinted circuitboards. J Micromech Microeng 19(7):11
Donald BR, Levey CG, McGray CD et al (2006) An untethered, electrostatic, globally controllable MEMS micro-robot. J Microelectromech Syst 15(1):1–15
Tai YC, Fan LS and Muller RS (1989) IC-processed micro-motors: design, technology, and testing. Micro Electro Mechanical Systems. In: Proceedings, An Investigation of Micro Structure, Sensors, Actuators, Machines and Robots. IEEE, pp1–6
Mezaghi S, Koechli C, Perriard Y (2011) Development of a hybrid MEMS BLDC micromotor. IEEE Trans Ind Appl 47(1):3–11
Farahani AA, Suratgar AA and Taalebi HA (2013) Dynamics model and control of underwater fish-like micro mobile robot with PZT actuator. First RSI/ISM International Conference on Robotics and Mechatronics, pp 437–442
Iwata A, Amemiya Y (1995) Neural network LSI. IEICE, pp 1–2, pp 124–125
Lu Z, Ma S, Li B et al (2005) Design of a snake-like robot controller with cyclic inhibitory CPG model. In: IEEE International Conference on Robot and Biomimetics, pp 35–40
Hodgkin AL, Huxley AF (1952) A quanitative description of membrane current and its application to conduction and excitation in nerve. J Physiol 117(4):500–544
Nagumo J, Arimoto S, Yoshizawa S (1962) An active pulse transmission line simulating nerve axon. Proceedings of the IRE. 50:2061–2070
Sekine Y (1999) Pulse-type hardware neuron model. Computer today. 90:27–33, Saiens-sha Co. Ltd. Publishers
Sekine Y, Sumiyama M, Saeki K et al (2001) A Λ-type neuron model using enhancement-mode MOSFETs. IEICE, C, Vol. J84-C, No. 10, 988–994
Okazaki K, Ogiwara T, Yang D et al (2011) Development of pulse control type MEMS micro robot with hardware neural network. Artificial Life Robot 16:229–233
Uchikoba F, Takato M, Saito K (2012) Hardaware neural networks controlled MEMS rotational actuators and application to micro robot. J Mech Eng Automation 2:499–506
Maezumi K, Yamasaki S, Obara H et al (2014) Hexapod-Type SMA Driven MEMS Microrobot with Mounted Bare Chip Artificial Neural Networks IC. Proc Nineteenth Int Symp Artificial Life Robot 2014:401–405
Saito K, Matsuda A, Saeki K et al (2011) Synchronization of coupled pulse-type hardware neuron models for CPG model. The relevance of the time domain to neural network models, Springer Series on Cognitive and Neural Systems. pp 117–133
Acknowledgments
This study was supported by the Nihon University College of Science and Technology Project Research, JSPS KAKENHI Grants (25420226), Nihon University Academic Research Grant (Total research, “14-002”). Specimen fabrication was supported by the Research Center for Micro Functional Devices of Nihon University. The VLSI chip in this study has been fabricated by Digian Technology, Inc. This work is supported by VLSI Design and Education Center (VDEC), the University of Tokyo in collaboration with Synopsys, Inc., Cadence Design Systems, Inc. and Mentor Graphics, Inc.
Author information
Authors and Affiliations
Corresponding author
Additional information
http://www.eme.cst.nihon-u.ac.jp/~uchikoba/.
This study was supported by JSPS KAKENHI Grants 25420226. Nihon University Academic Research Grant (Total research “14-002”) and CST research project of Nihon University. Specimen fabrication was supported by the Research Center for Micro Functional Devices of Nihon University. The VLSI chip in this study has been fabricated by Digian Technology. Inc. This work is supported by VLSI Design and Education Center (VDEC). The University of Tokyo in collaboration with Synopsys. Inc. Cadence Design Systems Inc. and Mentor Graphics Inc.
About this article

Cite this article
Ishihara, Y., Naito, Y., Maezumi, K. et al. IC design of driving circuit of MEMS microrobot using pulse-type hardware neuron model. Artif Life Robotics 21, 201–206 (2016). https://doi.org/10.1007/s10015-016-0273-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-016-0273-x