
Abstract
Towards controlling the frequency of limit cycle locomotion as well as adapting to rough terrain and performing specific tasks, a novel and indirect method has been recently introduced using an active wobbling mass attached to limit cycle walkers. One of the strongest advantages of the method is the easiness of its implementation, prompting its applicability to a wide variety of locomotion systems. To deeply understand the nonlinear dynamics for further enhancement of the methodology, we use a combined rimless wheel with an active wobbling mass as an example to perform nonlinear analysis in this paper. First, we introduce the simplified equation of motion and the gait frequency control method. Second, we obtain Arnold tongue, which represents region of entrained locomotion. In regions where the locomotion is not entrained, we explore chaotic and quasi-periodic gaits. To characterize bistability of two different locomotions that underlie hysteresis phenomena, basins of attraction for the two locomotions were computed. The present nonlinear analysis may help understanding the detailed mechanism of indirectly controlled limit cycle walkers.









Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Goswami A, Espiau B, Keramane A (1996) Limit cycle walking and their stability in a passive bipedal gait. In: Proceedings of the IEEE International Conference on Robotics and Automation, pp 246-251
William C (1996) The pumping of a swing from the standing position. Am J Phys 64(3):215–219
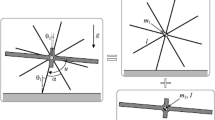
Asano F, Tokuda I (2015) Indirectly controlled limit cycle walking of combined rimless wheel based on entrainment to active wobbling mass. Multibody Syst Dyn 34(2):191–210
Li L, Asano F, Tokuda I (2017) High-speed and energy-efficient locomotion of a seed-like underactuated robot on level surface by utilizing asymmetric wobbling effects. In: Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, pp 1014-1019
Boyland PL (1986) Bifurcations of circle maps: Arnold tongues, bistability and rotation intervals. Commun Math Phys 106(3):353–381
Matsugu M, Duffin J, PooN C (1998) Entrainment, instability, quasi-periodicity, and Chaos in a compound neural oscillator. J Comput Neurosci 5(1):35–51
Shinya A, Yamashita T, Tsuchiya K (2015) Hysteresis in the gait transition of a quadruped investigated using simple body mechanical and oscillator network models. Phys Rev E 83(6):061909
Celso G, Ott E, Yorke JA (1987) Basin boundary metamorphoses: changes in accessible boundary orbits. Nucl Phys B Proc Suppl 2:281–300
Harata Y, Asano F, Taji K, Uno Y (2009) Efficient parametric excitation walking with delayed feedback control, efficient parametric excitation walking with delayed feedback control. In: Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 2934-2939
Liljebäck P, Pettersen KY, Stavdahl Ø, Gravdahl JT (2009) Stability analysis of snake robot locomotion based on Poincar maps. In: Proceedings of the 2009 IEEE/RSJ International Conference Intelligent Robots and Systems, pp 3623-3630
Harada T, Tanaka H, Hankins MJ, Ziss IK (2010) Optimal waveform for the entrainment of a weakly force oscillator. Phys Rev Lett 105(8):088301
Bischoff S, Jan S Luther, Parlitz U (2016) Estimability and dependency analysis of model parameters based on delay coordinates. Phys Rev E 94(3):032221
Acknowledgements
This research was partially supported by Grant-in-Aid for Scientific Research (C) No. 16K06154, provided by the Japan Society for the Promotion of Science (JSPS).
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 2nd International Symposium on Swarm Behavior and Bio-Inspired Robotics, Kyoto, October 29 - November 1, 2017.
About this article

Cite this article
Li, L., Tokuda, I. & Asano, F. Nonlinear analysis of an indirectly controlled limit cycle walker. Artif Life Robotics 23, 508–514 (2018). https://doi.org/10.1007/s10015-018-0478-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-018-0478-2