
Abstract
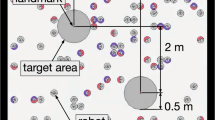
This paper focuses on the effect of the embodiment of robots on collective behavior in robotic swarms. The research field of swarm robotics emphasizes the importance of the embodiment of robots; however, only a few studies have discussed how it influences the collective behavior of a robotic swarm. In this paper, a path-formation task is performed by robotic swarms in computer simulations with and without considering collisions among robots to discuss the effect of the robot embodiment. Additionally, the experiments were performed with varying the size of robots. The robot controllers were obtained by an evolutionary robotics approach. The results show that the robot collisions would affect not only the performance of the robotic swarm but also the emergent behavior to accomplish the task. The robot collisions seem to provide feedback on robotic swarms to emerge the division of labor among robots to manage congestion.













Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Notes
The experiments are conducted with the Box2D physics engine (available at http://box2d.org).
References
Bonabeau E, Dorigo M, Theraulaz G (1999) Swarm intelligence: from natural to artificial systems. Oxford University Press, Oxford
Blum C, Groß R (2015) Swarm intelligence in optimization and robotics. Springer handbook of computational intelligence. Springer, Berlin, pp 1291–1309
Şahin E (2005) Swarm robotics: from sources of inspiration to domains of application. Swarm robotics, lecture notes in computer science, vol 3342. Springer, Berlin, pp 10–20
Dorigo M, Birattari M, Brambilla M (2014) Swarm robotics. Scholarpedia 9(1):1463
Lerman K, Galstyan A (2002) Mathematical model of foraging in a group of robots: effect of interference. Auton Robots 13(2):127–141
Hiraga M, Ohkura K (2019) Effects of congestion on swarm performance and autonomous specialization in robotic swarms. J Robot Mechatron 31(4):526–534
Hamann H (2013) Towards swarm calculus: urn models of collective decisions and universal properties of swarm performance. Swarm Intell 7(2–3):145–172
Hamann H (2018) Swarm robotics: a formal approach. Springer, Berlin
Brambilla M, Ferrante E, Birattari M, Dorigo M (2013) Swarm robotics: a review from the swarm engineering perspective. Swarm Intell 7(1):1–41
Bayındır L (2016) A review of swarm robotics tasks. Neurocomputing 172:292–321
Nolfi S, Floreano D (2000) Evolutionary robotics: the biology, intelligence, and technology of self-organizing machines. MIT Press, Cambridge
Sperati V, Trianni V, Nolfi S (2011) Self-organised path formation in a swarm of robots. Swarm Intell 5(2):97–119
Hiraga M, Yasuda T, Ohkura K (2018a) Evolutionary acquisition of autonomous specialization in a path-formation task of a robotic swarm. J Adv Comput Intell Intell Inform 22(5):621–628
Hiraga M, Wei Y, Yasuda T, Ohkura K (2018b) Evolving autonomous specialization in congested path formation task of robotic swarms. Artif Life Robot 23(4):547–554
Yao X (1999) Evolving artificial neural networks. Proc IEEE 87(9):1423–1447
Floreano D, Dürr P, Mattiussi C (2008) Neuroevolution: from architectures to learning. Evol Intel 1(1):47–62
Beyer HG, Schwefel HP (2002) Evolution strategies: a comprehensive introduction. Nat Comput 1(1):3–52
Eiben AE, Smith JE (2003) Introduction to evolutionary computing. Springer, Berlin
Dussutour A, Beshers S, Deneubourg JL, Fourcassié V (2009) Priority rules govern the organization of traffic on foraging trails under crowding conditions in the leaf-cutting ant Atta colombica. J Exp Biol 212(4):499–505
Fourcassié V, Dussutour A, Deneubourg JL (2010) Ant traffic rules. J Exp Biol 213(14):2357–2363
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was presented in part at the 3rd International Symposium on Swarm Behavior and Bio-Inspired Robotics (Okinawa, Japan, November 20–22, 2019).
About this article

Cite this article
Hiraga, M., Tamura, Y. & Ohkura, K. Behavioral specialization emerges from the embodiment of a robotic swarm. Artif Life Robotics 25, 495–502 (2020). https://doi.org/10.1007/s10015-020-00641-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-020-00641-3