
Abstract
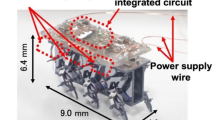
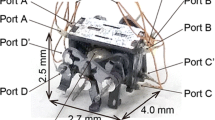
Insects have millimeter-sized bodies but excellent autonomous control. Therefore, numerous researchers have been bio-inspired by their attractive features to create highly functional robots. In this research, we investigated a neural network integrated circuit (NNIC) that generated the driving waveform of an insect-type microrobot. Previously, we discussed an NNIC that had a switching mechanism for the gait pattern. It could switch between the tripod gait pattern and ripple gait pattern typical of insects. The simulation results revealed that the gait was unstable when changed by varying the coupling coefficient voltage of the synaptic model. In addition, the order of the ripple gait pattern had an error under certain conditions. In this paper, we compare the measurement results with the simulation results. As unstable gaits do not appear in the measurement results, the fabricated NNIC generated a more stable gait pattern than the simulation.












Similar content being viewed by others

References
Ebefors T, Mattsson JU, Kälvesten E, et al. (1999) A Walking silicon micro-robot, Proc. of the 10th Int. Conference on Solid-State Sensors and Actuators, Sendai, Japan. pp. 1202–1205
Chen Y, Doshi N, Goldberg B, Wang H et al (2018) Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot. Nat Commun 9:2495
Birkmeyer P, Peterson K, Fearing RS (2009) DASH: A dynamic 16g hexapedal robot, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO. pp. 2683–2689
Tanaka D, Hayakawa U, Kawamura S et al (2017) Four-leg independent mechanism for MEMS microrobot. Artif Life Robot 22(3):380–384
Saito K, Contreras DS, Takeshiro Y, et al. (2018) Study on silicon device of microrobot system for heterogeneous integration, International Conference on Electronics Packaging and iMAPS All Asia Conference (ICEP-IAAC).
Kawamura S, Tanaka D, Tanaka T et al (2018) Neural networks IC controlled multi-legged walking MEMS robot with independent leg mechanism. Arti Life Robot 23(3):380–386
Ohara M, Kurosawa M, Sasaki T, et al. (2019), Development of hardware neural networks IC with switchable gait pattern for insect-type microrobot, 2019 IEEE/SICE International Symposium on System Integration Paris, France. pp. 663–668
Acknowledgements
This work was supported by JSPS KAKENHI Grant Number JP18K04060. Also, the part of this research supported by the Research Institute of Science and Technology Nihon University College of Science and Technology Leading Research Promotion Grant. The fabrication of the hexapod-type microrobot was supported by the Research Center for Micro Functional Devices, Nihon University. The VLSI chip of Fig. 1 has been fabricated by Digian Technology, Inc. This work is supported by VLSI Design and Education Center (VDEC), the University of Tokyo in collaboration with Synopsys, Inc., Cadence Design Systems, Inc. and Mentor Graphics, Inc. The VLSI chip in this study has been fabricated in the chip fabrication program of VLSI Design and Education Center (VDEC), the University of Tokyo in collaboration with On-Semiconductor Niigata, and Toppan Printing Corporation. Also, we appreciate the Nihon University Robotics Society. The author would like to thank Enago (www.enago.jp) for the English language review.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Kurosawa, M., Sasaki, T., Usami, Y. et al. Neural networks integrated circuit with switchable gait pattern for insect-type microrobot. Artif Life Robotics 26, 297–303 (2021). https://doi.org/10.1007/s10015-021-00678-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-021-00678-y