
Abstract
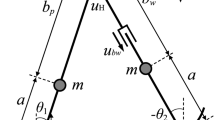
Biped robots have attracted wide attention in exploring the mechanism of human walking, and are expected to provide rich application scenarios. Nonetheless, stable and effective gait generation is not easy to achieve. At present, the mainstream biped walking control method similar to full drive does not fully consider and make use of the dynamics of the robot itself, resulting in low walking efficiency. To overcome this problem, an indirect method has been recently introduced to leverage the natural dynamics of passive dynamic walking. In this work, we introduce a more straightforward approach to strengthen its implementation ability. First, we introduce the modeling and control method of the compass-like robot with semicircular feet. Second, we conduct numerical simulations to observe the typical gait and analyze its results. Third, we investigated the effect of feed-forward control on walking performance. Moreover, a Poincaré map is used to test the stability of the system.









Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Sakagami Y, Watanabe R, Aoyama C, Matsunaga S, Higaki N, Fujimura K (2002) The intelligent ASIMO: system overview and integration. Proc IEEE/RSJ Int Conf Intell Robots Syst 3:2478–2483
McGeer T (1990) Passive dynamic walking. Int J Robot Res 9(2):62–82
McGeer T (1990) Passive walking with knees. Proc IEEE Conf Robot Autom 2:1640–1645
Goswami A, Espiau B, Keramane A (1996) Limit cycle walking and their stability in a passive bipedal gait. Proc IEEE Int Conf Robot Autom 1:246–251
Asano F, Luo Z, Yamakita M (2005) Biped gait generation and control based on a unified property of passive dynamic walking. IEEE Trans Robot 21(4):754–762
Li L, Tokuda I, Asano F (2020) Energy-efficient locomotion generation and theoretical analysis of a quasi-passive dynamic walker. IEEE Robot Autom Lett 5(3):4305–4312
Altendorfer R, Koditschek DE, Holmes P (2004) Stability analysis of a clock-driven rigid-body SLIP model for RHex. Int J Robot Res 23(10–11):1001–1012
Mombaur KD, Longman RW, Bock HG, Schlöder JP (2005) Open-loop stable running. Robotica 23(1):21–33
Obayashi I, Aoi S, Tsuchiya K, Kokubu H (2015) Common formation mechanism of basin of attraction for bipedal walking models by saddle hyperbolicity and hybrid dynamics. Jpn J Ind Appl Math 32(2):315–332
Taga G, Yamaguchi Y, Shimizu H (1991) Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment. Biol Cybern 65(3):147–159
Miyakoshi S, Taga G, Kuniyoshi Y, Nagakubo A (2000) Three dimensional bipedal stepping motion using neural oscillators-towards humanoid motion in the real world-. J Robot Soc Jpn 18(1):87–93
Aoi S, Tsuchiya K (2007) Self-stability of a simple walking model driven by a rhythmic signal. Nonlinear Dyn 48(1):1–16
Giardina F, Iida F (2018) Efficient and stable locomotion for impulse-actuated robots using strictly convex foot shapes. IEEE Trans Robot 34(3):674–685
Pikovsky A, Rosenblum M, Kurths J (2002) Synchronization: a universal concept in nonlinear science
Asano F, Tokuda I (2015) Indirectly controlled limit cycle walking of combined rimless wheel based on entrainment to active wobbling motion. Multibody Syst Dyn 34(2):191–210
Li L, Tokuda I, Asano F (2020) Optimal fast entrainment waveform for indirectly controlled limit cycle walker against external disturbances. In: Proceedings of the IEEE international conference on robotics and automation. pp 3458–3463
Goswami A, Thuilot B, Espiau B (1996) Compass-Like Biped Robot Part I: Stability and Bifurcation of Passive Gaits. Res. Rep. INRIA
Goswami A, Espiau B, Keramane A (1997) Limit cycles in a passive compass gait biped and passivity-mimicking control laws. Autonom Robots 4(3):273–286
Li L, Tokuda I, Asano F (2018) Optimal input waveform for an indirectly controlled limit cycle walker. In: Proceedings of the IEEE/RSJ international conference on intelligent robots and systems, pp 7454–7459
Acknowledgements
This research was partially supported by JAIST Research Grants (Houga).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Yan, C., Asano, F. & Li, L. Modeling, control and analysis of semicircular-footed bipedal robot with entrainment effect. Artif Life Robotics 27, 384–392 (2022). https://doi.org/10.1007/s10015-022-00732-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-022-00732-3