
Abstract
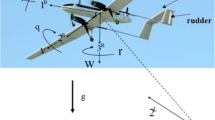
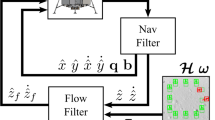
This paper addresses the problem of on-board estimation of the state and/or the velocity components of an unknown leader by open-loop control of a single camera installed on the follower aircraft. Unlike the conventional pan-tilt gimbal rigidly mounted onboard, a custom-built stabilized platform can allow for an additional translational degree of freedom to the existing pan-tilt capability. The only information about the unknown leader is deduced from its bearing and subtended angles in the image plane of the camera. An adaptive estimation algorithm is applied to estimate the state vector and the geometric parameters of the unknown object from visual measurements outside the flight control loop of the follower aircraft. Asymptotic convergence of the estimated parameters to the true ones is proven and shown to be independent of the flight controller. The estimated parameters can be used in the guidance law of the follower aircraft without any modifications to it. The main benefit of the proposed paradigm is in this decoupling of estimation from control.
Similar content being viewed by others

References
Betsesr A, Vela P, Tannenbaum A (2004) Automatic tracking of flying vehicles using geodesic snakes and Kalman filtering. In: Proceedings of the 43rd IEEE conference on decision and control
Bar-Shalom Y, Li X (1993) Estimation and tracking: principles, techniques and software. Artech House, Boston
Cao C, Hovakimyan N (2005) Vision-based air-to-air tracking using intelligent excitetion. In: Proceedings of the American control conference, pp 5091–5096
Cao C, Hovakimyan N (2006a) Design and analysis of a novel \({\mathcal{L}_1}\) adaptive control architecture, Part I: control signal and asymptotic stability. In: Proceedings of American control conference, pp 3397–3402
Cao C, Hovakimyan N (2006b) Design and analysis of a novel \({\mathcal{L}_1}\) adaptive control architecture, Part II: guaranteed transient performance. In: Proceedings of American control conference, pp 3403–3408
Chang W, Lin S (1992) Incremental maneuver estimation model for target tracking. IEEE Trans Aerosp Electron Syst 28(2): 439–451
Johnson EN, Calise AJ, Sattigeri R, Watanabe Y (2004) Approches to vision based formation control. In: Proceedings of the AIAA guidance, navigation and control conferance
Gurfil P, Kasdin NJ (2002) Optimal passive and active tracking using the two-step estimator. In: Proceedings of the AIAA guidance, navigation and control conferance, AIAA paper 2002–5022
Hepner S, Geering H (1991) Adaptive two time-scale tracking filter for target acceleration estimation. J Guid Control Dyn 14(3): 581–588
Ljung L (1979) Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems. IEEE Trans Autom Contr 24(1): 36–50
Oshman Y, Shinar J (1999) Using a multiple model adaptive estimator in a random evison missile/aircraft estimation. In: Proceedings of the AIAA guidance, navigation and control conferance, AIAA paper 99-4141
Pomet J, Praly L (1992) Adaptive nonlinear regulation: estimation from the Lyapunov equation. IEEE Trans Autom Contr 37(6): 729–740
Sattigeri R, Calise AJ, Evers JH (2003) An adaptive approch to the vision based formation control. In: Proceedings of the AIAA guidance, navigation and control conferance
Stepanyan V, Hovakimyan N (2005) An adaptive disturbance rejection controller for visual tracking of a maneuvering target. In: AIAA guidance, navigation, and control conference and exhibit, AIAA- 2005-6000
Wang IH, Dobrokhodov VN, Kaminer I, Jones KD (2005). On vision-based target tracking and range estimation for small UAVs. In: AIAA guidance, navigation, and control conference and exhibit, AIAA-2005-6401
Watanabe Y, Johnson EN, Calise AJ (2004) Optimal 3-D guidance fro a 2-D vision sensor. In: Proceedings of the AIAA guidance, navigation and control conferance
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Cao, C., Hovakimyan, N. & Evers, J. Active control of visual sensor for navigation and guidance. Comput Manag Sci 7, 85–110 (2010). https://doi.org/10.1007/s10287-008-0077-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10287-008-0077-0