
Abstract
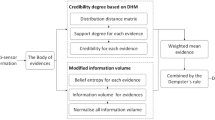
Multi-sensor information fusion plays an important role in practical application. Although D-S evidence theory can handle this information fusion task regardless of prior knowledge, counter-intuitive conclusions may arise when dealing with highly conflicting evidence. To address this weakness, an improved algorithm of evidence theory is proposed. First, a new distribution distance measurement method is first proposed to measure the conflict between the evidences, and the credibility degree of the evidences can be obtained. Next, a modified information volume calculation method is also introduced to measure the effect of the evidence itself, and the information volume of the evidences can be generated. Afterwards, the credibility degree of each evidence can be modified based on the information volume to obtain the weight of each evidence. Ultimately, the weights of the evidences will be used to adjust the body of evidence before fusion. A numerical example for engine fault diagnosis exhibits the availability and effectiveness of the proposed method, where the BPA of the true fault is 89.680%. Furthermore, an application for target recognition is given to show the validity of the proposed algorithm, where the BPA of the true target is 98.948%. The experimental results show that the proposed algorithm has the best performance than other methods.






Similar content being viewed by others

References
Wu Y, Patterson A, Santos R D, Vijaykumar N L (2014) Topology preserving mapping for maritime anomaly detection, pp 313–326. https://doi.org/10.1007/978-3-319-09153-2_24
Callen M, Isaqzadeh M, Long J D, Sprenger C (2014) Violence and Risk Preference: Experimental Evidence from Afghanistan. Amer Econ Rev 104(1):123–148. https://doi.org/10.1257/aer.104.1.123
Abdulhafiz W, Khamis A (2014) Bayesian approach with pre- and post-filtering to handle data uncertainty and inconsistency in mobile robot local positioning. J Intell Syst 23. https://doi.org/10.1515/jisys-2013-0078
Meng W, Hong B-R, Han X-D (2003) Lunar robot information fusion based on D-S evidence theory. J Harbin Instit Technol 35:1040–2
Koch W (2013) Tracking and sensor data fusion: Methodological framework and selected applications, vol 8
Filipowicz W (2014) Mathematical Theory of Evidence in Navigation. In: Cuzzolin F (ed) Belief Functions: Theory and Applications. Third International Conference, BELIEF 2014. Proceedings: LNCS 8764. Belief Functions: Theory and Applications. Third International Conference, BELIEF 2014, Oxford. Springer International Publishing, Cham, p 199–208
Jin Z, Wang X, Gui Q, Liu B, Song S (2013) Improving diagnostic accuracy using multiparameter patient monitoring based on data fusion in the cloud. Lect Notes Electr Eng 276. https://doi.org/10.1007/978-3-642-40861-8_66
Fortino G, Galzarano S, Gravina R, Li W (2014) A framework for collaborative computing and multi-sensor data fusion in body sensor networks. Inf Fusion 22. https://doi.org/10.1016/j.inffus.2014.03.005
Yang D, Zhenghai W, Lin X, Tiankui Z (2014) Online bayesian data fusion in environment monitoring sensor networks. Int J Distrib Sens Netw 2014:1–10. https://doi.org/10.1155/2014/945894
Vinodini Ramesh M (2018) Wireless sensor network for disaster monitoring
Dubois D, Prade H (2001) Possibility theory, probability theory and multiple-valued logics: A clarification. Ann Math Artif Intell 32(1-4):35–66. https://doi.org/10.1023/A:1016740830286
Broemeling L D (2011) An account of early statistical inference in arab cryptology. Amer Stat 65(4):255–257. https://doi.org/10.1198/tas.2011.10191
Klaua D (1967) Ein ansatz zur mehrwertigen mengenlehre. Math Nachrichten 33(5-6):273–296. https://doi.org/10.1002/mana.19670330503
Pawlak Z (1982) Rough sets. Int J Comput Inf Sci 11(5):341–356. https://doi.org/10.1007/BF01001956
Dempster A P (1967) Upper and lower probabilities induced by a multivalued mapping, pp 57–72. https://doi.org/10.1007/978-3-540-44792-4_3
Shafer G (1976) A mathematical theory of evidence, vol 42
Murphy C K (2000) Combining belief functions when evidence conflicts. Decis Support Syst 29 (1):1–9. https://doi.org/10.1016/S0167-9236(99)00084-6
Yong D, WenKang S, ZhenFu Z, Qi L (2004) Combining belief functions based on distance of evidence. Decis Support Syst 38(3):489–493. https://doi.org/10.1016/j.dss.2004.04.015
Zhang Z, Liu T, Chen D, Zhang W (2014) Novel algorithm for identifying and fusing conflicting data in wireless sensor networks. Sens (Basel, Switzerland) 14:9562–9581. https://doi.org/10.3390/s140609562
Yuan K, Xiao F, Fei L, Kang B, Deng Y (2016) Modeling sensor reliability in fault diagnosis based on evidence theory. Sensors 16:113. https://doi.org/10.3390/s16010113
Xiao F (2019) Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf Fusion 46:23–32. https://doi.org/10.1016/j.inffus.2018.04.003
Lin J (1991) Divergence measures based on the shannon entropy. IEEE Trans Inf Theory 37 (1):145–151. https://doi.org/10.1109/18.61115
Cox R T (1946) Probability, frequency, and reasonable expectation. Am J Phys 14(2):1–13. https://doi.org/10.2307/2272983
Lamberti P W, Majtey A P (2003) Non-logarithmic jensen-shannon divergence. Physica A: Stat Mech Appl 329(1):81–90. https://doi.org/10.1016/S0378-4371(03)00566-1
Kullback S, Leibler R A (1951) On information and sufficiency. Ann Math Statist 22(1):79–86. https://doi.org/10.1214/aoms/1177729694
Kullback S (1962) Information theory and statistics. Popul (French Ed) 17:377. https://doi.org/10.2307/1527125
Deng Y (2016) Deng entropy. Chaos Solitons Fractals 91:549–553. https://doi.org/10.1016/j.chaos.2016.07.014
Cui H, Liu Q, Zhang J, Kang B (2019) An improved deng entropy and its application in pattern recognition. IEEE Access 7:18284–18292. https://doi.org/10.1109/ACCESS.2019.2896286.
Fan F, Zuo M (2006) Fault diagnosis of machines based on d-s evidence theory. part 1: D-s evidence theory and its improvement. Pattern Recogn Lett 27:366–376. https://doi.org/10.1016/j.patrec.2005.08.025
Yager R R (1987) On the dempster-shafer framework and new combination rules. Inf Sci 41 (2):93–137. https://doi.org/10.1016/0020-0255(87)90007-7
Acknowledgments
This research was funded by National Key Research and Development Program of China, grant number 2016YFB0501805.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhao, K., Sun, R., Li, L. et al. An improved evidence fusion algorithm in multi-sensor systems. Appl Intell 51, 7614–7624 (2021). https://doi.org/10.1007/s10489-021-02279-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10489-021-02279-5