
Abstract
This work proposes a novel robotic exoskeleton for rehabilitation of the index finger. Though all motions of index finger are essential, the major range of motion is covered by flexion/extension motion. Hence, a Stephenson III six-bar mechanism has been synthesized for the robotic exoskeleton device for a pre-defined trajectory to address post stroke rehabilitation of patients. The flexion/extension trajectory was obtained experimentally using image processing. Based on the trajectory, a mathematical model was formulated which was used as the objective function for the optimization problem. To eliminate any defects that may be encountered during the synthesis, “loop-by-loop defect rectification” procedure was implemented along with well-established optimization algorithms such as TLBO, BWP, GWO and PSO for synthesis of the desired mechanism. It has been found that TLBO outperformed all the others as it could reduce the objective function value to 0.69849. whereas, BWP reduced it to 8.9952, GWO reduced it to 13.1388, and PSO could only reduce it to 6 × 105. Therefore, the design obtained using TLBO was considered for developing the prototype of the device. The device was validated experimentally using image processing, and it is found to cover the prescribed range of motion. Thus, the proposed exoskeleton is deemed to be a viable solution for post stroke index-finger rehabilitation.






















Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Abbreviations
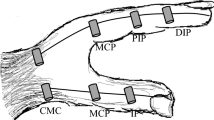
- MCP:
-
Metacarpophalangeal
- PIP:
-
Proximal interphalangeal
- DIP:
-
Distal interphalangeal
- \({P}_{xd},{P}_{yd}\) :
-
X and Y coordinates of precision points
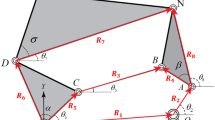
- \({r}_{xy}\) :
-
Link vectors
- \({L}_{i}, {U}_{i}\) :
-
Upper and Lower limits of design variables
- \({B}_{i}\) :
-
Boolean function
- \({\theta }_{i}\) :
-
Links orientation angles
- α:
-
Vector \({r}_{32}\) is constrained to vector \({r}_{35d}\) by angle α at point \(A\)
- β:
-
Here, vector \({r}_{32}\) is constrained to vector \({r}_{35d}\) by angle α at point \(A\), \(A_{ox}\), \(A_{oy}\)
- TLBO:
-
Teaching and Learning Based Optimization
- BWP:
-
Best-Worst Play
- PSO:
-
Particle Swarm Optimization
- GWO:
-
Grey Wolf Optimization
- SE:
-
Structural Error
- PLA:
-
Polylactic acid
References
Kamalakannan S, Gudlavalleti AS, Gudlavalleti VS, Goenka S, Kuper H (2017) Incidence & prevalence of stroke in India: A systematic review. Indian J Med Res 146(2):175
Kleindorfer DO, Towfighi A, Chaturvedi S, Cockroft KM, Gutierrez J, Lombardi-Hill D, Kamel H, Kernan WN, Kittner SJ, Leira EC, Lennon O (2021) Guideline for the Prevention of Stroke in Patients With Stroke and Transient Ischemic Attack: A Guideline From the American Heart Association/American Stroke Association. Stroke. 2021 May 24:STR-0000000000000375
Mohr JP, Wolf PA, Moskowitz MA, Mayberg MR, Von Kummer R (2011) Stroke E-Book: Pathophysiology, Diagnosis, and Management. Elsevier Health Sciences. May 13
Pinter MM, Brainin M (2012) Rehabilitation after stroke in older people. Maturitas 71(2):104–108
Bagg S, Pombo AP, Hopman W (2002) Effect of age on functional outcomes after stroke rehabilitation. Stroke 33(1):179–185
Langhorne P, Bernhardt J, Kwakkel G (2011) Stroke rehabilitation. The Lancet 377(9778):1693–1702
Dirette D, Hinojosa J (1994) Effects of continuous passive motion on the edematous hands of two persons with flaccid hemiplegia. Am J Occup Ther 48(5):403–409
Takahashi CD, Der-Yeghiaian L, Le V, Motiwala RR, Cramer SC (2008) Robot-based hand motor therapy after stroke. Brain 131(2):425–437
Hwang CH, Seong JW, Son DS (2012) Individual finger synchronized robot-assisted hand rehabilitation in subacute to chronic stroke: a prospective randomized clinical trial of efficacy. Clin Rehabil 26(8):696–704
Ahuja CS, Wilson JR, Nori S, Kotter MR, Druschel C, Curt A, Fehlings MG (2017) Traumatic spinal cord injury. Nat Rev Dis Primers 3(1):1–21
Fasoli SE, Krebs HI, Stein J, Frontera WR, Hogan N (2003) Effects of robotic therapy on motor impairment and recovery in chronic stroke. Arch Phys Med Rehabil 84(4):477–482
Ferraro M, Palazzolo JJ, Krol J, Krebs HI, Hogan N, Volpe BT (2003) Robot-aided sensorimotor arm training improves outcome in patients with chronic stroke. Neurology 61(11):1604–1607
Aurora RN, Kristo DA, Bista SR, Rowley JA, Zak RS, Casey KR, Lamm CI, Tracy SL, Rosenberg RS (2014) The Treatment of Restless Legs Syndrome and Periodic Limb Movement Disorder in Adults—An Update for 2012: Practice Parameters with an Evidence-Based Systematic Review and Meta-Analyses: An American Academy of Sleep Medicine Clinical Practice Guideline. Focus 12(1):99–121
Stroke Statistic (2009) Update. Centennial, CO: National Stroke Association
Kwakkel G, Kollen BJ, van der Grond J, Prevo AJ (2003) Probability of regaining dexterity in the flaccid upper limb: impact of severity of paresis and time since onset in acute stroke. Stroke 34(9):2181–2186
Lelieveld MJ, Maeno T, Tomiyama T (2006) Design and development of two concepts for a 4 DOF portable haptic interface with active and passive multi-point force feedback for the index finger. Int Des Eng Tech Conf Comput Inf Eng Conf 42568:547–556
Fu Y, Wang P, Wang S, Liu H, Zhang F (2007) Design and development of a portable exoskeleton based CPM machine for rehabilitation of hand injuries. In: 2007 IEEE Int Conf Robot Biomim (ROBIO). IEEE, 1476–1481
Wege A, Kondak K, Hommel G (2005) Mechanical design and motion control of a hand exoskeleton for rehabilitation. In: IEEE Int Conf Mechatron Autom, 2005, vol 1. IEEE, pp 155-159
Yamaura H, Matsushita K, Kato R, Yokoi H (2009) Development of hand rehabilitation system for paralysis patient–universal design using wire-driven mechanism–. In2009 Annual Int Conf IEEE Eng Med Biol Soc, IEEE, pp 7122–7125
Worsnopp TT, Peshkin MA, Colgate JE, Kamper DG (2007) An actuated finger exoskeleton for hand rehabilitation following stroke. In: 2007 IEEE 10th Int Conf Rehab Robot, IEEE, pp 896–901
Chiri A, Giovacchini F, Vitiello N, Cattin E, Roccella S, Vecchi F, Carrozza MC (2009) HANDEXOS: Towards an exoskeleton device for the rehabilitation of the hand. In: 2009 IEEE/RSJ Int Conf Intell Robots Syst IEEE, pp 1106–1111
Mulas M, Folgheraiter M, Gini G (2005) An EMG-controlled exoskeleton for hand rehabilitation. In: 9th Int Conf Rehab Robotics, ICORR, IEEE, pp 371–374
Brown P, Jones D, Singh SK, Rosen JM (1993) The exoskeleton glove for control of paralyzed hands. In: [1993] Proceedings IEEE Int Conf Robot Autom, IEEE, pp 642–647
Shields BL, Main JA, Peterson SW, Strauss AM (1997) An anthropomorphic hand exoskeleton to prevent astronaut hand fatigue during extravehicular activities. IEEE Transact Syst Man Cybernetics-Part A: Syst Hum 27(5):668–673
Orlando MF, Akolkar H, Dutta A, Saxena A, Behera L (2010) Optimal design and control of a hand exoskeleton. In: 2010 IEEE Conf RoboT Autom Mechatronics, IEEE, pp 72–77
Li J, Zheng R, Zhang Y, Yao J (2011) iHandRehab: An interactive hand exoskeleton for active and passive rehabilitation. In: 2011 IEEE Int ConF Rehab Robot, IEEE, pp 1–6
Patton JL, Mussa-Ivaldi FA (2004) Robot-assisted adaptive training: custom force fields for teaching movement patterns. IEEE Trans Biomed Eng 51(4):636–646
Liepert J, Bauder H, Miltner WH, Taub E, Weiller C (2000) Treatment-induced cortical reorganization after stroke in humans. Stroke 31(6):1210–1216
Kolb B, Gibb R (1991) Environmental enrichment and cortical injury: behavioral and anatomical consequences of frontal cortex lesions. Cereb Cortex 1(2):189–198
Will BE, Rosenzweig MR, Bennett EL, Hebert M, Morimoto H (1977) Relatively brief environmental enrichment aids recovery of learning capacity and alters brain measures after postweaning brain lesions in rats. J Comp Physiol Psychol 91(1):33
Krebs HI, Volpe BT, Ferraro M, Fasoli S, Palazzolo J, Rohrer B, Edelstein L, Hogan N (2002) Robot-aided neurorehabilitation: from evidence-based to science-based rehabilitation. Top Stroke Rehabil 8(4):54–70
Chi-Yeh H (1966) A general method for the optimum design of mechanisms. J Mech 1(3–4):301–313
Kramer SN, Sandor GN. Selective precision synthesis—a general method of optimization for planar mechanisms
Sohoni VN, Haug EJ. A state space technique for optimal design of mechanisms
Cabrera JA, Simon A, Prado M (2002) Optimal synthesis of mechanisms with genetic algorithms. Mech Mach Theory 37(10):1165–1177
Cabrera JA, Ortiz A, Nadal F, Castillo JJ (2011) An evolutionary algorithm for path synthesis of mechanisms. Mech Mach Theory 46(2):127–141
Prange GB, Jannink MJ, Groothuis-Oudshoorn CG, Hermens HJ, Ijzerman MJ (2009) Systematic review of the effect of robot-aided therapy on recovery of the hemiparetic arm after stroke. J Rehabil Res Dev 43(2):171–184
Balsalobre-Fernández C, Tejero-González CM, del Campo-Vecino J, Bavaresco N (2014) The concurrent validity and reliability of a low-cost, high-speed camera-based method for measuring the flight time of vertical jumps. J Strength Conditioning Res 28(2):528–533
Puig-Diví A, Escalona-Marfil C, Padullés-Riu JM, Busquets A, Padullés-Chando X, Marcos-Ruiz D (2019) Validity and reliability of the Kinovea program in obtaining angles and distances using coordinates in 4 perspectives. PLoS ONE 14(6):e0216448
Yang TH, Lu SC, Lin WJ, Zhao K, Zhao C, An KN, Jou IM, Lee PY, Kuo LC, Su FC (2016) Assessing finger joint biomechanics by applying equal force to flexor tendons in vitro using a novel simultaneous approach. PLoS ONE 11(8):e0160301
Gasser BW, Martínez A, Sasso-Lance E, Kandilakis C, Durrough CM, Goldfarb M (2020) Preliminary Assessment of a Hand and Arm Exoskeleton for Enabling Bimanual Tasks for Individuals With Hemiparesis. IEEE Trans Neural Syst Rehabil Eng 28(10):2214–2223
Wang D, Meng Q, Meng Q, Li X, Yu H (2018) Design and development of a portable exoskeleton for hand rehabilitation. IEEE Trans Neural Syst Rehabil Eng 26(12):2376–2386
Wege A, Hommel G (2005) Development and control of a hand exoskeleton for rehabilitation of hand injuries. In2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp 3046–3051
Gosselin CM, Laliberte T (1998) inventors; Universite Laval, assignee. Underactuated mechanical finger with return actuation. United States patent US 5,762,390
Baek SF, Lee SH, Chang JH (1999) Design and control of a robotic finger for prosthetic hands. InProceedings 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), vol. 1, IEEE, pp 113–117
Nudo RJ, Wise BM, SiFuentes F, Milliken GW (1996) Neural substrates for the effects of rehabilitative training on motor recovery after ischemic infarct. Science 272(5269):1791–1794
Schaechter JD, Kraft E, Hilliard TS, Dijkhuizen RM, Benner T, Finklestein SP, Rosen BR, Cramer SC (2002) Motor recovery and cortical reorganization after constraint-induced movement therapy in stroke patients: a preliminary study. Neurorehabil Neural Repair 16(4):326–338
Singh R, Chaudhary H, Singh AK (2017) A new hybrid teaching–learning particle swarm optimization algorithm for synthesis of linkages to generate path. Sādhanā 42(11):1851–1870
Chakraborty D, Rathi A, Singh R, Pathak VK, Chaudhary K, Chaudhary H (2021) Design of a Stephenson III six-bar path generating mechanism for index finger rehabilitation device using nature-inspired algorithms. Neural Comput Appl 22:1–5
Pathak VK, Singh AK, Singh R, Chaudhary H (2017) A modified algorithm of Particle Swarm Optimization for form error evaluation. tm-Technisches Messen 84(4):272–92
Purves WK, Berme N, Paul JP (1979) Finger joint biomechanics. In: Disability, Palgrave Macmillan, London, pp 318–332
Singh R, Chaudhary H, Singh AK (2017) Defect-free optimal synthesis of crank-rocker linkage using nature-inspired optimization algorithms. Mech Mach Theory 1(116):105–122
Rao RV, Savsani VJ, Vakharia DP (2011) Teaching–learning-based optimization: a novel method for constrained mechanical design optimization problems. Comput Aided Des 43(3):303–315
Singh R, Gaurav K, Pathak VK, Singh P, Chaudhary H. Best-Worst-Play (BWP): A metaphor-less Optimization Algorithm. InJournal of Physics: Conference Series 2020 Feb 1 (Vol. 1455, No. 1, p. 012007). IOP Publishing.
Orlando MF, Behera L, Dutta A, Saxena A (2020) Optimal Design and Redundancy Resolution of a Novel Robotic Two-Fingered Exoskeleton. IEEE Transactions on Medical Robotics and Bionics 2(1):59–75
Carbone G, Gerding EC, Corves B, Cafolla D, Russo M, Ceccarelli M (2020) Design of a Two-DOFs driving mechanism for a motion-assisted finger exoskeleton. Appl Sci 10(7):2619
Hu D, Howard D, Ren L (2014) Biomechanical analysis of the human finger extensor mechanism during isometric pressing. PLoS ONE 9(4):e94533
Singh R, Chaudhary H, Singh AK (2019) A loop-by-loop defect rectification procedure for optimal synthesis of Stephenson III path generators. Meccanica 54(11):1869–1888
Seyedali Mirjalili, Seyed Mohammad Mirjalili, Andrew Lewis (2014) Grey Wolf Optimizer, Advances in Engineering Software, vol 69, p 46–61, ISSN 0965–9978, https://doi.org/10.1016/j.advengsoft.2013.12.007. (https://www.sciencedirect.com/science/article/pii/S0965997813001853)
Faris H, Aljarah I, Al-Betar MA et al (2018) Grey wolf optimizer: a review of recent variants and applications. Neural Comput & Applic 30:413–435. https://doi.org/10.1007/s00521-017-3272-5
Eberhart and Yuhui Shi (2001)Particle swarm optimization: developments, applications and resources," Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No.01TH8546), vol. 1, p 81–86 https://doi.org/10.1109/CEC.2001.934374
Y. Shen et al (2018) Research on Swarm Size of Multi-swarm Particle Swarm Optimization Algorithm," 2018 IEEE 4th International Conference on Computer and Communications (ICCC), pp. 2243–2247, https://doi.org/10.1109/CompComm.2018.8781013
Vasey B, Nagendran M, Campbell B et al (2022) Reporting guideline for the early-stage clinical evaluation of decision support systems driven by artificial intelligence: DECIDE-AI. Nat Med 28:924–933. https://doi.org/10.1038/s41591-022-01772-9
Robert Seifert, Manuel Weber, Emre Kocakavuk, Christoph Rischpler, David Kersting
(2021) Artificial Intelligence and Machine Learning in Nuclear Medicine: Future Perspectives, Seminars in Nuclear Medicine, 51(2):170–177,https://doi.org/10.1053/j.semnuclmed.2020.08.003ISSN 0001-2998
Abbasi Hamid, Yaghoobi Mahdi (2023) Optimized cascade chaotic fuzzy system (OCCFS) and its application to function approximation and chaotic systems identification. Soft Comput 27(13):8561–8582. https://doi.org/10.1007/s00500-023-08171-3
Abbasi H, Olyaee M, Ghafari H (2013) Rectifying Reverse Polygonization of Digital Curves for Dominant Point Detection. Int J Comput Sci Issues 10:154–163
Acknowledgements
Authors acknowledge the support and facilities provided by Manipal University Jaipur for successfully conclude this work with fruitful results.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chakraborty, D., Rathi, A. & Singh, R. Design and evaluation of exoskeleton device for rehabilitation of index finger using nature-inspired algorithms. Appl Intell 54, 10206–10223 (2024). https://doi.org/10.1007/s10489-024-05725-2
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10489-024-05725-2