
Abstract
This paper deals with the problem of stable grasping under pose uncertainty. Our method utilizes tactile sensing data to estimate grasp stability and make necessary hand adjustments after an initial grasp is established. We first discuss a learning approach to estimating grasp stability based on tactile sensing data. This estimator can be used as an indicator to the stability of the current grasp during a grasping procedure. We then present a tactile experience based hand adjustment algorithm to synthesize a hand adjustment and optimize the hand pose to achieve a stable grasp. Experiments show that our method improves the grasping performance under pose uncertainty.


















Similar content being viewed by others


Notes
Usually, a robot hand contains several DOFs, but we only want to control a subset of these DOFs during a hand adjustment procedure. For example, for the Barrett hand, we would only like to control its spread angle during a hand adjustment procedure. The DOFs of finger flexion will be controlled during hand closing.
References
Bekiroglu, Y., Laaksonen, J., Jorgensen, J. A., Kyrki, V., & Kragic, D. (2011). Assessing grasp stability based on learning and haptic data. IEEE Transactions on Robotics, 27(3), 616–629. doi:10.1109/TRO.2011.2132870.
Berenson, D., & Srinivasa, S. (2008). Grasp synthesis in cluttered environments for dexterous hands. In IEEE-RAS International Conference on Humanoid Robots (Humanoids08).
Berenson, D., Srinivasa, S., Kuffner, J. (2009). Addressing pose uncertainty in manipulation planning using task space regions. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009).
Bierbaum, A., & Rambow, M., (2009). Grasp affordances from multi-fingered tactile exploration using dynamic potential fields. In Humanoid Robots 2009, Humanoids 2009 (pp. 168–174). doi:10.1109/ICHR.2009.5379581.
Bohg, J., & Kragic, D. (2010). Learning grasping points with shape context. Robotics and Autonomous Systems, 58, 362–377. doi:10.1016/j.robot.2009.10.003.
Boularias, A., Kroemer, O., & Peters, J. (2011). Learning robot grasping from 3-d images with markov random fields. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2011 (pp 1548–1553).
Brook, P., Ciocarlie, M., & Hsiao, K. (2011). Collaborative grasp planning with multiple object representations. In IEEE International Conference on Robotics and Automation (ICRA) 2011. (pp 2851–2858). doi:10.1109/ICRA.2011.5980490.
Chang, C. C., & Lin, C. J. (2001). LIBSVM: A library for support vector machines. http://www.csie.ntu.edu.tw/~cjlin/libsvm. Accessed 20 July 2013.
Ciocarlie, M., Goldfeder, C., & Allen, P. (2007a). Dimensionality reduction for hand-independent dexterous robotic grasping. In IEEE/RSJ International Conference on Intelligent Robots and Systems (2007), IROS 2007 (pp. 3270–3275). doi:10.1109/IROS.2007.4399227.
Ciocarlie, M., Lackner, C., & Allen, P. (2007b). Soft finger model with adaptive contact geometry for grasping and manipulation tasks. World Haptics Conference (pp. 219–224).
Ciocarlie, M. T., & Allen, P. K. (2009). Hand posture subspaces for dexterous robotic grasping. The International Journal of Robotics Research, 28(7), 851–867.
Coelho, J. A., & Grupen, R. A. (1997). A control basis for learning multifingered grasps. Journal of Robotic Systems, 14(7), 545–557.
Cortes, C., & Vapnik, V. (1995). Support-vector networks. Machine Learning, 20, 273–297. doi:10.1007/BF00994018.
Dang, H., & Allen, P. (2012). Learning grasp stability. In IEEE International Conference on Robotics and Automation (ICRA) 2012 (pp. 2392–2397). doi:10.1109/ICRA.2012.6224754.
Dang, H., Weisz, J., & Allen, P.K. (2011). Blind grasping: Stable robotic grasping using tactile feedback and hand kinematics. In IEEE International Conference on Robotics and Automation (ICRA), 2011 (pp. 5917–5922) doi:10.1109/ICRA.2011.5979679.
Detry, R., Ek, C., Madry, M., Piater, J., & Kragic, D. (2012). Generalizing grasps across partly similar objects. In IEEE International Conference on Robotics and Automation (ICRA), 2012 (pp. 3791–3797). doi:10.1109/ICRA.2012.6224992.
Diankov, R., & Kuffner, J. (2008). Openrave: A planning architecture for autonomous robotics. Robotics Institute, Pittsburgh, PA, Technical, Report CMU-RI-TR-08-34.
Dogar, M., & Srinivasa, S. (2011). A framework for push-grasping in clutter. In N. R. Hugh Durrant-Whyte & P. Abbeel (Eds.), Robotics: Science and Systems VII. Cambridge, MA: MIT Press.
El-Khoury, S., & Sahbani, A. (2010). A new strategy combining empirical and analytical approaches for grasping unknown 3d objects. Robotics and Autonomous Systems, 58, 497–507.
Felip, J., Laaksonen, J., Morales, A., & Kyrki, V. (2013). Manipulation primitives: A paradigm for abstraction and execution of grasping and manipulation tasks. Robotics and Autonomous Systems, 61(3), 283–296. doi:10.1016/j.robot.2012.11.010.
Ferrari, C., & Canny, J. (1992). Planning optimal grasps. In IEEE International Conference on Robotics and Automation (pp. 2290–2295). doi:10.1109/ROBOT.1992.219918.
Geidenstam, S., Huebner, K., Banksell, D., & Kragic, D. (2009). Learning of 2D grasping strategies from box-based 3D object approximations. In Proceedings of Robotics: Science and Systems, Seattle, USA.
Goldfeder, C., & Allen, P. (2011). Data-driven grasping. Autonomous Robots, 31, 1–20. doi:10.1007/s10514-011-9228-1.
Goldfeder, C., Allen, P., Lackner, C., & Pelossof, R. (2007). Grasp planning via decomposition trees. In IEEE International Conference on Robotics and Automation 2007 (pp. 4679–4684). doi:10.1109/ROBOT.2007.364200.
Goldfeder, C., Ciocarlie, M., Dang, H., & Allen, P. (2009a). The columbia grasp database. In IEEE International Conference on Robotics and Automation 2009, ICRA ’09 (pp. 1710–1716).
Goldfeder, C., Ciocarlie, M., Peretzman, J., Dang, H., & Allen, P. (2009b). Data-driven grasping with partial sensor data. In IEEE/RSJ International Conference on Intelligent Robots and Systems 2009, IROS 2009 (pp. 1278–1283). doi:10.1109/IROS.2009.5354078.
Harris, Z. (1970). Distributional structure. In Papers in Structural and Transformational Linguistics. Dordrecht: D. Reidel Publishing Company (pp. 775–794).
Hebert, P., Hudson, N., Ma, J., Howard, T., Fuchs, T., Bajracharya, M., & Burdick, J. (2012). Combined shape, appearance and silhouette for simultaneous manipulator and object tracking. In IEEE International Conference on Robotics and Automation (ICRA) 2012 (pp 2405–2412). doi:10.1109/ICRA.2012.6225084.
Horowitz, M. B., & Burdick, J. W. (2012). Combined grasp and manipulation planning as a trajectory optimization problem. In IEEE International Conference on Robotics and Automation (ICRA) 2012 (pp. 584–591). doi:10.1109/ICRA.2012.6225104.
Hsiao, K., Chitta, S., Ciocarlie, M., & Jones, E. (2010). Contact-reactive grasping of objects with partial shape information. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 1228–1235).
Hsiao, K., Kaelbling, L., & Lozano-PÃI’rez, T. (2011). Robust grasping under object pose uncertainty. Autonomous Robots, 31, 253–268. doi:10.1007/s10514-011-9243-2.
Huebner, K., & Kragic, D. (2008). Selection of robot pre-grasps using box-based shape approximation. In IEEE/RSJ International Conference on Intelligent Robots and Systems 2008, IROS 2008 (pp. 1765–1770). doi:10.1109/IROS.2008.4650722.
Jia, Y.B. (2000). Grasping curved objects through rolling. In Proceedings of IEEE International Conference on Robotics and Automation 2000, ICRA ’00 (Vol. 1, pp. 377–382). doi:10.1109/ROBOT.2000.844085.
Jiang, L. T., & Smith, J. R. (2012). Seashell effect pretouch sensing for robotic grasping. In IEEE International Conference on Robotics and Automation (ICRA), 2012 (pp. 2851–2858). doi:10.1109/ICRA.2012.6224985.
Jiang, Y., Moseson, S., & Saxena, A. (2011). Efficient grasping from rgbd images: Learning using a new rectangle representation. In IEEE International Conference on Robotics and Automation (ICRA), 2011 (pp. 3304–3311). doi:0.1109/ICRA.2011.5980145.
Kazemi, M., Valois, J. S., Bagnell, J. A., & Pollard, N. (2012). Robust object grasping using force compliant motion primitives. In Proceedings of Robotics: Science and Systems, Sydney, Australia.
Kim, J., Iwamoto, K., Kuffner, J. J., Ota, Y., & Pollard, N. S. (2012). Physically-based grasp quality evaluation under uncertainty. In IEEE International Conference on Robotics and Automation (ICRA), 2012 (pp. 3258–3263). doi:10.1109/ICRA.2012.6225342.
Klingbeil, E., Rao, D., Carpenter, B., Ganapathi, V., Ng, A.Y., & Khatib, O. (2011). Grasping with application to an autonomous checkout robot. In IEEE International Conference on Robotics and Automation (ICRA), 2011 (pp. 2837–2844). doi:10.1109/ICRA.2011.5980287.
Kootstra G, PopoviÄG M, JÃÿrgensen JA, Kuklinski K, Miatliuk K, Kragic D, & KrÃger N. (2012). Enabling grasping of unknown objects through a synergistic use of edge and surface information. The International Journal of Robotics Research, 31(10), 1190–1213. doi:10.1177/0278364912452621.
Laaksonen, J., Nikandrova, E., & Kyrki, V. (2012). Probabilistic sensor-based grasping. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012 (pp. 2019–2026). doi:10.1109/IROS.2012.6385621.
Le, Q., Kamm, D., Kara, A., & Ng, A. (2010). Learning to grasp objects with multiple contact points. In IEEE International Conference on Robotics and Automation (ICRA), 2010 (pp. 5062–5069). doi:10.1109/ROBOT.2010.5509508.
Li, Z., & Sastry, S. (1988). Task-oriented optimal grasping by multifingered robot hands. IEEE Journal of Robotics and Automation, 4(1), 32–44. doi:10.1109/56.769.
López-Coronado, J., & Pedreño Molina, J. (2002). A neural model for visual-tactile-motor integration in robotic reaching and grasping tasks. Robotica, 20, 23–31.
Lourakis M (Jul. 2004). levmar: Levenberg-marquardt nonlinear least squares algorithms in C/C++. Retrieved Jan 31, 2005 from http://www.ics.forth.gr/lourakis/levmar/.
MacQueen, J. B. (1967). Some methods for classification and analysis of multivariate observations. In L.M.L Cam, J. Neyman (Eds.). Proceedings of the fifth Berkeley Symposium on Mathematical Statistics and Probability Berkeley: University of California Press (Vol. 1, pp. 281–297).
Miller, A., & Allen, P. (1999). Examples of 3d grasp quality computations. In Proceeding of IEEE International Conference on Robotics and Automation 1999 (Vol. 2, pp. 1240–1246).
Miller, A., Knoop, S., Christensen, H., & Allen, P. (2003). Automatic grasp planning using shape primitives. In Proceedings of IEEE International Conference on Robotics and Automation 2003, ICRA ’03 (Vol. 2, pp. 1824–1829). doi:10.1109/ROBOT.2003.1241860.
Miller, A. T., & Allen, P. K. (2004). Graspit! a versatile simulator for robotic grasping. IEEE Robotics & Automation Magazine, 11(4), 110–122.
Mishra, T., & Mishra, B. (1994). Reactive algorithms for 2 and 3 finger grasping. In IEEE/RSJ International Workshop on Intelligent Robots and Systems.
Morales, A., Prats, M., Sanz, P., & Pobil, A.P. (2007). An experiment in the use of manipulation primitives and tactile perception for reactive grasping. In Workshop on Robot Manipulation: Sensing and Adapting to the Real World, Robotics: Science and Systems (RSS 2007).
Nikandrova E, Laaksonen J, & Kyrki V (2012). Explorative sensor-based grasp planning. In G. Herrmann, M. Studley, M. Pearson, A. Conn, C. Melhuish, M. Witkowski, J.H. Kim, P. Vadakkepat (Eds.), Lecture Notes in Computer Science, Advances in Autonomous Robotics (Vol. 7429, pp. 197–208), Berlin: Springer.
Papazov, C., & Burschka, D. (2010). An efficient ransac for 3d object recognition in noisy and occluded scenes. In Asian Conference on Computer Vision (pp. 135–148).
Petrovskaya, A., Khatib, O., Thrun, S., & Ng, A. (2006). Bayesian estimation for autonomous object manipulation based on tactile sensors. In Proceedings of IEEE International Conference on Robotics and Automation 2006, ICRA (2006) (pp. 707–714). doi:10.1109/ROBOT.2006.1641793.
Pezzementi, Z., Jantho, E., Estrade, L., & Hager, G. (2010). Characterization and simulation of tactile sensors. In IEEE International Conference on Haptics Symposium 2010 (pp. 199–205). doi:10.1109/HAPTIC.2010.5444654.
Pezzementi, Z., Reyda, C., & Hager, G. (2011). Object mapping, recognition, and localization from tactile geometry. In IEEE International Conference on Robotics and Automation (ICRA), 2011 (pp. 5942–5948). doi:10.1109/ICRA.2011.5980363.
Platt, R. (2007). Learning grasp strategies composed of contact relative motions. In 7th IEEE-RAS International Conference on Humanoid Robots 2007 (pp. 49–56). doi:10.1109/ICHR.2007.4813848.
Platt, R., Fagg, A., & Grupen, R. (2010). Null-space grasp control: Theory and experiments. IEEE Transactions on Robotics, 26(2), 282–295. doi:10.1109/TRO.2010.2042754.
Platt, R., Permenter, F., & Pfeiffer, J. (2011). Using bayesian filtering to localize flexible materials during manipulation. IEEE Transactions on Robotics, 27(3), 586–598. doi:10.1109/TRO.2011.2139150.
Popovic, M., Kraft, D., Bodenhagen, L., Baseski, E., Pugeault, N., Kragic, D., et al. (2010). A strategy for grasping unknown objects based on co-planarity and colour information. Robotics and Autonomous Systems, 58(5), 551–565.
Przybylski, M., Asfour, T., & Dillmann, R. (2011). Planning grasps for robotic hands using a novel object representation based on the medial axis transform. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 1781–1788).
Rao, D., Le, Q., Phoka, T., Quigley, M., Sudsang, A., & Ng, A. (2010). Grasping novel objects with depth segmentation. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 2578–2585).
Roa, M. A., Argus, M. J., Leidner, D., Borst, C., & Hirzinger, G. (2012). Power grasp planning for anthropomorphic robot hands. In IEEE International Conference on Robotics and Automation (ICRA), 2012 (pp. 563–569). doi:10.1109/ICRA.2012.6225068.
Saxena, A., Driemeyer, J., Kearns, J., & Ng, A. Y. (2007). Robotic grasping of novel objects. In B. Schölkopf, J. Platt, & T. Hoffman (Eds.), Advances in Neural Information Processing Systems 19 (pp. 1209–1216). Cambridge, MA: MIT Press.
Saxena, A., Driemeyer, J., & Ng, A. Y. (2008). Robotic grasping of novel objects using vision. The International Journal of Robotics Research, 27(2), 157–173.
Shilane, P., Min, P., Kazhdan, M., & Funkhouser, T. (2004). The princeton shape benchmark. In Shape Modeling International (pp. 167–178).
Stulp, F., Theodorou, E., Buchli, J., & Schaal, S. (2011). Learning to grasp under uncertainty. In IEEE International Conference on Robotics and Automation (ICRA) (pp. 5703–5708).
Suárez, R., Roa, M., & Cornella, J. (2006). Grasp quality measures. Technical Report, Technical University of Catalonia. http://hdl.handle.net/2117/316. Accessed 20 July 2013.
Suykens, J. A. K., Alzate, C., & Pelckmans, K. (2010). Primal and dual model representations in kernel-based learning. Statistics Surveys, 4, 148–183. doi:10.1214/09-ss052.
Wang, D., Watson, B.T., & Fagg, A. (2007). A switching control approach to haptic exploration for quality grasps. In Proceedings of the Robotics: Science & Systems 2007 Workshop on Sensing and Adapting to the Real World.
Weisz, J., & Allen, P.K. (2012). Pose error robust grasping from contact wrench space metrics. In IEEE International Conference on Robotics and Automation (ICRA), 2012. (pp. 557–562). doi:10.1109/ICRA.2012.6224697.
Zhang, L., & Trinkle, J. C. (2012). The application of particle filtering to grasping acquisition with visual occlusion and tactile sensing. In IEEE International Conference on Robotics and Automation (ICRA) 2012 (pp. 3805–3812). doi:10.1109/ICRA.2012.6225125.
Acknowledgments
This work is funded by NSF Grant IIS-0904514.
Author information
Authors and Affiliations
Corresponding author
Appendix: simulating tactile sensors
Appendix: simulating tactile sensors
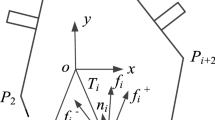
Figure 19 shows an example of tactile sensor simulation on a Barrett hand. To simulate tactile sensors, the first step is to find a contact model to approximate the force distribution near each contact point. In the GraspIt! simulator, a robotic hand and a graspable object are both treated as rigid bodies. Thus, each contact detected by a collision detection system is initially modeled as a point contact. In the real world, however, the hand and the object in contact are actually deformable to some extent, resulting in an area in contact rather than a point. A point contact assumption then no longer holds reasonably. To simulate the contact region between the two bodies touching each other, we use a soft finger contact model as is developed in (Ciocarlie et al. 2007b). This model takes into account the local geometry and structure of the objects in contact and captures frictional effects such as coupling between tangential force and frictional torque. It locally approximates the surfaces of the two touching bodies as
where the local contact coordinate system has its origin at the center of the contact and the \(z\) axis aligned with the normal of the contact. The subscript \(i\) distinguishes the contacting bodies from each other.

Tactile sensor simulation. a A robotic grasp of a Barrett hand on a mug. b The simulated sensor responses on the hand. c–e The tactile responses on finger F1, F2, F3 respectively. f The tactile readings on the palm. The tactile readings go from black (no response) to pink (saturation) (Color figure online)
Based on this approximation, we can deduce the separation \(h\) between two surfaces in the form of
where \(R^{\prime }\) and \(R^{\prime \prime }\) are the relative radii of curvature of the objects in contact, depending only on their local geometry.
After a contact region is determined, we consider how the forces are formed within the contact region so that the response of the corresponding tactile sensor cells can be analyzed and evaluated. To express the pressure distribution inside a contact region using non-planar models that take into account the local geometry of the objects involved, we choose a Hertzian model as used in (Ciocarlie et al. 2007b).
In this model, the ratio of frictional torque to contact load which is used to compute the eccentricity parameter of the friction ellipsoid can be obtained from
where \(\mu \) is the frictional coefficient, \(\tau _n\) is a frictional moment about the contact normal, \(P\) is the contact load, and \(a\) and \(b\) are the lengths of the semi-axes.
Based on the soft finger contact model, we compute the contact region for a hand-object contact as well as the pressure distribution within the contact region. Since a tactile sensor cell performs as an atomic sensing unit, we discretize the soft finger contact region so that we can accumulate the total forces within each discrete part and use this to compute the forces sensed on each corresponding tactile sensor cell. We summarize the procedure to generate the tactile feedback of a robotic grasp in Algorithm 4.

Rights and permissions
About this article
Cite this article
Dang, H., Allen, P.K. Stable grasping under pose uncertainty using tactile feedback. Auton Robot 36, 309–330 (2014). https://doi.org/10.1007/s10514-013-9355-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-013-9355-y