
Abstract
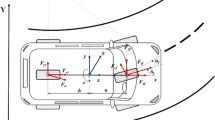
The aim of this paper is to present a novel approach to enable a four-wheel steer four-wheel drive (4WS4WD) vehicle to follow a predefined path under force control. The novelty is in the combination of a sliding mode controller that determines the steering angles using a kinematic model and a real-time particle swarm optimization based controller that determines the drive torques using a dynamic model. The dynamic model takes into account all the slip forces acting on the vehicle. The combined controllers are then used to drive the 4WS4WD vehicle to follow a path. In order to enable the implementation of the controllers, the path to be followed is generated using 7-order Bézier curves that can provide smooth kinematic and dynamic reference profiles. Simulation results are provided to demonstrate the applicability of the proposed methodology and its robustness.














Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Ackermann, J., & Sienel, W. (1993). Robust yaw damping of cars with front and rear wheel steering. IEEE Transactions on Control Systems Technology, 1(1), 15–20. doi:10.1109/87.221348.
Arvind, V. (2013). Optimizing the turning radius of a vehicle using symmetric four wheel steering system. International Journal of Scientific and Engineering Research, 4, 2177–2184.
Baffet, G., Charara, A., & Stephant, J. (2006). Sideslip angle, lateral tire force and road friction estimation in simulations and experiments. In IEEE international conference on control applications computer aided control system design (pp. 903–908). doi:10.1109/CACSD-CCA-ISIC.2006.4776765.
Carlisle, A., & Doizier, G. (2001). An off-the-shelf PSO. In Proceedings of the workshop on particle swarm optimization, Indianapolis (pp. 1–6). http://libra.msra.cn/Publication/2038172/an-off-the-shelf-pso.
Choi, J., Curry, R. E., & Elkaim, G. H. (2010). Continuous curvature path generation based on Bézier curves for autonomous vehicles. International Journal of Applied Mathematics, 40(2), 91–101.
Chuan, L., & Quanyuan, F. (2007). The standard particle swarm optimization algorithm convergence analysis and parameter selection. In Third international conference on natural computation (Vol. 3, pp. 823–826). doi:10.1109/ICNC.2007.746.
Dai, P., & Katupitiya, J. (2014). Path planning and force control of a 4WD4WS vehicle. In: Australasian conference on robotics and automation (ACRA).
Eberhart, R., & Shi, Y. (2001). Particle swarm optimization: Developments, applications and resources. Evolutionary Computation, 1, 81–86. doi:10.1109/CEC.2001.934374.
Grand, C., & Benamar, F. (2010). Motion kinematic analysis of wheel legged rover over 3D surface with posture adaptation. Mechanism and Machine Theory, 45(3), 477–495. doi:10.1016/j.mechmachtheory.2009.10.007.
Gulez, K., & Guclu, R. (2008). CBA-neural network control of a nonlinear full vehicle model. Simulation Modelling Practice and Theory, 16(9), 1163–1176. doi:10.1016/j.simpat.2008.06.001.
Itoh, H., Oida, A., & Yamazaki, M. (1999). Numerical simulation of a 4WD–4WS tractor turning in a rice field. Journal of Terramechanics, 36(2), 91–115. doi:10.1016/S0022-4898(98)00037-8.
Jia, Y. (2000). Robust control with decoupling performance for steering and traction of 4WS vehicles under velocity-varying motion. IEEE Transactions on Control Systems Technology, 8(3), 554–569. doi:10.1109/87.845885.
Liu, W., Liu, L., & Cartes, D. (2008). Efforts on real-time implementation of PSO based PMSM parameter identification. In: Power and energy society general meeting—Conversion and delivery of electrical energy in the 21st century (pp. 1–7). doi:10.1109/PES.2008.4596324.
Liu, C., Meng, Y., Zhang, J., & Kong, C. (2010). Dynamics simulation for 4ws vehicle steering performance. In 2010 3rd international conference on advanced computer theory and engineering (Vol. 5, pp. 108–110).
Lohmiller, W., & Slotine, J. J. (1997). Applications of contraction analysis. In Proceedings of the 36th IEEE conference on decision and control (Vol. 2, pp. 1044–1049). doi:10.1109/CDC.1997.657584.
Maalouf, E., Saad, M., & Saliah, H. (2006). A higher level path tracking controller for a four-wheel differentially steered mobile robot. Robotics and Autonomous Systems, 54(1), 23–33. doi:10.1016/j.robot.2005.10.001.
Peng, S. T., Chang, C. C., & Sheu, J. J. (2007). On robust bounded control of the combined wheel slip with integral compensation for an autonomous 4WS4WD vehicle. Vehicle System Dynamics, 45(5), 477–503. doi:10.1080/00423110701316578.
Pisano, A., & Usai, E. (2011). Sliding mode control: A survey with applications in math. Mathematics and Computers in Simulation, 81(5), 954–979. doi:10.1016/j.matcom.2010.10.003.
Ramaswamy, S., & Balakrishnan, S. (2008). Formation control of car-like mobile robots: A Lyapunov function based approach. In: American control conference (pp. 657–662). doi:10.1109/ACC.2008.4586567.
Shao, J., Xie, G., & Wang, L. (2007). Leader-following formation control of multiple mobile vehicles. IET on Control Theory and Applications, 1(2), 545–552. doi:10.1049/iet-cta:20050371.
Sleight, R., & Agrawal, S. K. (2004). Dynamic model of a four-wheel-drive HMMWV. In 28th biennial mechanisms and robotics conference (Vol. 2, pp. 1183–1191). doi:10.1115/DETC2004-57444.
Sleight, R., & Agrawal, S. K. (2007). Runge–Kutta methods and inverse Hermite interpolation. In International symposium on symbolic and numeric algorithms for scientific computing (pp. 118–123). SYNASC. doi:10.1109/SYNASC.2007.28.
Solea, R., Filipescu, A., Filipescu, S., & Dumitrascu, B. (2010). Sliding-mode controller for four-wheel-steering vehicle: Trajectory-tracking problem. In 2010 8th world congress on intelligent control and automation (WCICA) (pp. 1185–1190).
Spentzas, K. N., Alkhazali, I., & Demic, M. (2001). Dynamics of four-wheel-steering vehicles. Forschung im Ingenieurwesen, 66(6), 260–266.
Udengaard, M., & Iagnemma, K. (2007). Kinematic analysis and control of an omnidirectional mobile robot in rough terrain. In: IEEE/RSJ international conference on intelligent robots and systems, IROS (pp. 795–800). doi:10.1109/IROS.2007.4398996.
Utkin, V. (1993). Sliding mode control design principles and applications to electric drives. IEEE Transactions on Industrial Electronics, 40(1), 23–36. doi:10.1109/41.184818.
Wang, W., & Song, Y. (2013). A new high dimension nonlinear dynamics simulation model for four-wheel-steering vehicle. Journal of Mechanical Engineering Science, 227(1), 29–37. doi:10.1177/0954406212442045.
Wu, J., Wang, Q., Wei, X., & Tang, H. (2010). Studies on improving vehicle handling and lane keeping performance of closed-loop driver–vehicle system with integrated chassis control. Mathematics and Computers in Simulation, 80(12), 2297–2308. doi:10.1016/j.matcom.2010.04.028.
Young, K., Utkin, V., & Ozguner, U. (1999). A control engineer’s guide to sliding mode control. IEEE Transactions on Control Systems Technology, 7(3), 328–342. doi:10.1109/87.761053.
Zhou, S., Zhang, S., Zhao, G., Tang, C. (2010). Lateral stability control of car-trailer combination based on 4WS. In: International conference on measuring technology and mechatronics automation (ICMTMA) (Vol. 2, pp. 576–579). doi:10.1109/ICMTMA.2010.123.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Dai, P., Taghia, J., Lam, S. et al. Integration of sliding mode based steering control and PSO based drive force control for a 4WS4WD vehicle. Auton Robot 42, 553–568 (2018). https://doi.org/10.1007/s10514-017-9649-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-017-9649-6