
Abstract
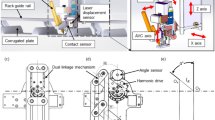
Inspection for corrosion of gas storage spheres at the welding seam lines must be done periodically. Until now this inspection is being done manually and has a high cost associated to it and a high risk of inspection personel injuries. The Brazilian Petroleum Company, Petrobras, is seeking cost reduction and personel safety by the use of autonomous robot technology. This paper presents the development of a robot capable of autonomously follow a welding line and transporting corrosion measurement sensors. The robot uses a pair of sensors each composed of a laser source and a video camera that allows the estimation of the center of the welding line. The mechanical robot uses four magnetic wheels to adhere to the sphere’s surface and was constructed in a way that always three wheels are in contact with the sphere’s metallic surface which guarantees enough magnetic atraction to hold the robot in the sphere’s surface all the time. Additionally, an independently actuated table for attaching the corrosion inspection sensors was included for small position corrections. Tests were conducted at the laboratory and in a real sphere showing the validity of the proposed approach and implementation.
Similar content being viewed by others

References
Bradski, G., Kaehler, A.: Learning OpenCV. O’Reilly Media (2008)
Caracciolo, L., De Luca, A., Iannitti, S.: Trajectory tracking control of a four-wheel differentially driven mobile robot. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp. 2632–2638 (1999)
Fei, Y., Zhao, X., Wan, J.: Motion analysis of a modular inspection robot with magnetic wheels. In: Proceedings of the 6th World Congress on Intelligent Control and Automation (WCICA), vol. 2, pp. 8187–8190 (2006)
Friedrich, M., Galbraith, W., Hayward, G.: Autonomous mobile robots for ultrasonic nde. In: Proceedings of the IEEE Ultrasonics Symposium, pp. 902–905 (2006)
Gerkey, B.: The player robot device interface. http://playerstage.sourceforge.net/doc/Player-2.1.0/player/ (2010)
Kawaguchi, Y., Yoshida, I., Iwao, K., Kikuta, T.: Sensors and crabbing for an in-pipe magnetic-wheeled robot. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 119 (1997)
Kozłowski, K., Pazderski, D.: Modeling and control of a 4-wheel skid-steering mobile robot. Int. J. Appl. Math. Comput. Sci. 14(4), 477–496 (2004)
Sogi, T., Kawaguchi, Y., Morisaki, H., Ohkawa, K., Kai, N., Hayakawa, H.: Inspection robot for spherical storage tanks. In: Proceedings of the 26th Annual Conference of the IEEE Industrial Electronics Society (IECON), vol. 1, pp. 393–398 (2000)
Yukawa, T., Suzuki, M., Satoh, Y., Okano, H.: Design of magnetic wheels in pipe inspection robot. In: Proceedings of the IEEE International Conference on Systems, Man and Cybernetics (SMC), vol. 1, pp. 235–240 (2006)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Okamoto, J., Grassi, V., Amaral, P.F.S. et al. Development of an Autonomous Robot for Gas Storage Spheres Inspection. J Intell Robot Syst 66, 23–35 (2012). https://doi.org/10.1007/s10846-011-9607-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-011-9607-z