
Abstract
Both labellability and realizability problems of planar projections of polyhedra (i.e., pictures) are known to be NP-complete problems. This is true, even in the case of trihedral polyhedra, where exactly three faces meet at every vertex. In this paper, we examine pictures that are taken to be projections of trihedral polyhedra without holes, and contain the projections of all edges (hidden and visible) of a polyhedron. In other words, we examine pictures which represent the entire shape of a trihedral polyhedron without holes. Such a picture is a connected graph P=(V,E) with |E| edges and |V| nodes, each of degree 3 (\(|E| = \frac{3|V|}{2}\)). We propose a mathematical scheme that constructs from the picture a Boolean formula Φ P , which is a conjunction of clauses, each consisting of at most two literals. Based on the satisfiability of Φ P , we show that both labellability and realizability problems can be solved efficiently in polynomial time. The category of pictures with hidden lines consists of the first category of pictures, where the labellability problem is solved in polynomial time, and, moreover, its solution implies the solution of the realizability problem in polynomial time too. Our approach may also prove useful in other applications of scene analysis.
Similar content being viewed by others



Notes
A literal \(\hat{F}_{i}\) denotes the occurrence of a variable F i or its negation ¬F i .
For each legal labelling of a junction v 1–v 2 there is a unique realization of v 1–v 2.
References
Alevizos, P.D.: A linear algorithm for labelling planar projections of polyhedra. In: Proc. IEEE/RSJ International Workshop on Intelligent Robots and Systems, IROS’91, Osaka, Japan, vol. 2, pp. 595–601 (1991)
Clowes, M.B.: On seeing things. Artif. Intell. 2, 79–116 (1971)
Cooper, M.C.: Wireframe projections: physical realisability of curved objects and unambiguous reconstruction of simple polyhedra. Int. J. Comput. Vis. 64(1), 69–88 (2005)
Cooper, M.C.: A Rich discrete labeling scheme for line drawings of curved objects. IEEE Trans. Pattern Anal. Mach. Intell. 30(4), 741–745 (2008)
Huffman, D.A.: Impossible objects as nonsense sentences. In: Meltzer, B., Michie, D. (eds.) Machine Intelligence, vol. 6, pp. 295–323. Edinburg University Press, Edinburg (1971)
Kirousis, L.M., Papadimitriou, C.H.: The complexity of recognizing polyhedral scenes. J. Comput. Syst. Sci. 37, 14–38 (1988)
Kirousis, L.M.: Effectively labelling planar projections of polyhedra. IEEE Trans. Pattern Anal. Mach. Intell. 12(2), 123–130 (1990)
Sankar, P.V.: A vertex coding scheme for interpreting ambigious trihedral solids. Comput. Graph. Image Process. 6, 61–89 (1977)
Sugihara, K.: Picture language for skeletal polyhedra. Comput. Graph. Image Process. 8, 382–405 (1978)
Sugihara, K.: Mathematical structures of line drawings of polyherdons-toward man-machine communication by means of line drawings. IEEE Trans. Pattern Anal. Mach. Intell. PAMI-4(5), 458–469 (1982)
Sugihara, K.: A necessary and sufficient condition for a picture to represent a polyhedral scene. IEEE Trans. Pattern Anal. Mach. Intell. PAMI-6(5), 578–586 (1984)
Sugihara, K.: Machine Interpretation of Line Drawings. MIT Press, Cambridge (1986)
Sugihara, K.: Realizability of polyhedrons from line drawings. In: Toussaint, G.T. (ed.) Computational Morphology, pp. 177–206. North-Holland, Elsevier, Amsterdam (1988)
Waltz, D.: Generating semanting descriptions from drawings of scenes with shadows. In: Winston, P.H. (ed.) The Psychology of Computer Vision, pp. 19–91. McGraw-Hill, New York (1975)
Acknowledgements
Lefteris M. Kirousis proposed to me to study this problem. Conversations with him had a profound influence on this paper. I would like also to thank my friend and colleague Moses Boudourides for agreeable discussions on the topic.
Author information
Authors and Affiliations
Corresponding author
Appendix: An Example of Labelling a Picture
Appendix: An Example of Labelling a Picture
The labelling of picture P=(V,E) in Fig. 1:

The first step of the labelling procedure: the use of propagation rules in picture P
- Step 1: :
-
Apply the propagation rules in picture P (Fig. 1) and divide the set E into planar circles; any circle B k (1≤k≤9) represents the projection of the boundary of a face f k of polyhedron \(\mathcal{P}\). Each B k is the boundary of a Boolean variable F k .
- Step 2: :
-
For each node v∈V, pick the corresponding Boolean formula Φ v from Fig. 12:

- Step 3: :
-
Construct the picture’s formula \(\varPhi_{P} = {\varPhi}_{v_{1}} \wedge {\varPhi}_{v_{2}} \ldots \wedge {\varPhi}_{v_{14}}\):

- Step 4: :
-
The truth assignment T P : F 1=F 5=F 7=F 8=F 9=F 2=F 3=F 6=F 4=true, satisfies the Boolean formula Φ P , and then we apply the Labelling Algorithm, which produces a “basic” labelling \(\mathcal{L}_{P}\) (Fig. 2).
Fig. 2 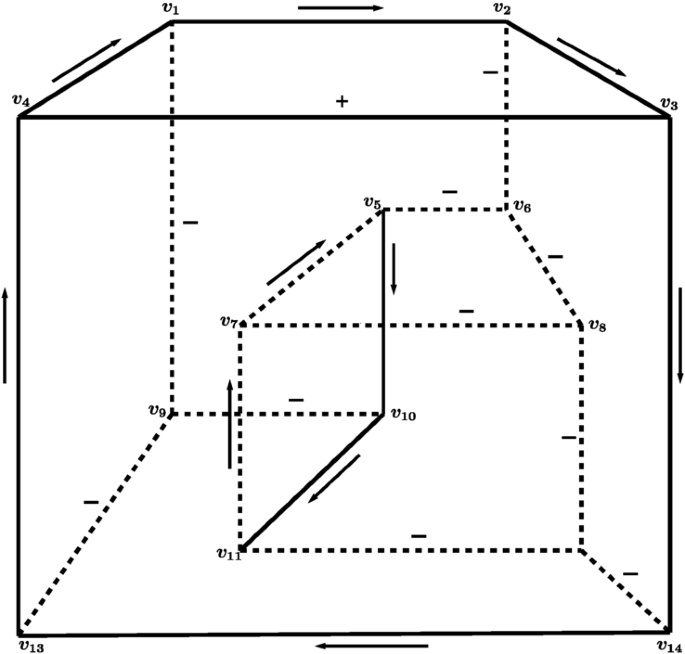
The “basic” labelling \(\mathcal{L}_{P}\), which is based on the model T P
- Step 5: :
-
Based on labelling \(\mathcal{L}_{P}\), we check in polynomial time with Sugihara’s algorithm the realizability of P by checking the planarity of picture’s “faces” (i.e., the planarity of the boundaries B k of variables F k , 1≤k≤9), and, if P is realizable, the actual coordinates of points and slopes of planes are determined in three-dimensional space. Thus, we produce a polyhedron \(\mathcal{P}\), projected on P.



Note that, using the free variables of T P , we can find all labellings of P. Each of these labellings can be used equivalently in the realizability process of Step-5.
-
(1)
The truth assignment F 1=F 5=F 7=F 8=F 9=F 2=F 3=F 6=true, F 4=free, produces the labelling of Fig. 3.
Fig. 3 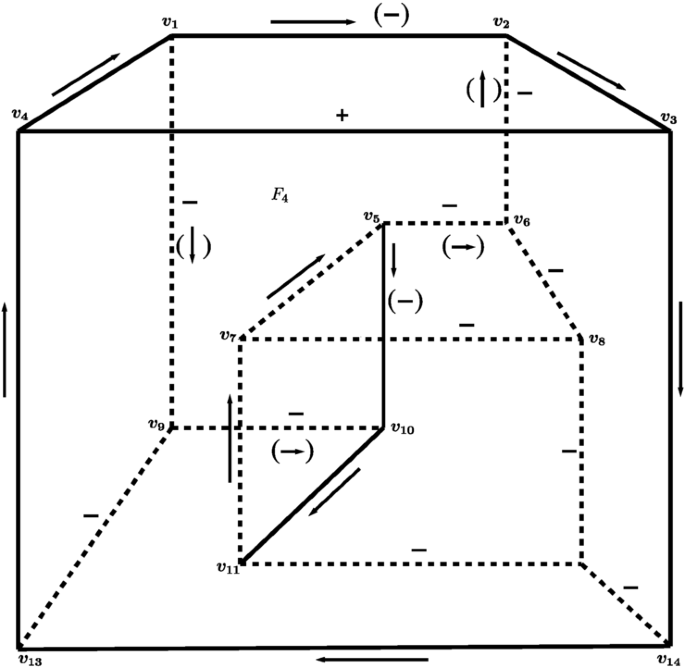
The labellings, which is based on the model T P , and the free variable F 4
-
(2)
The truth assignment F 1=F 5=F 7=F 8=F 9=F 4=F 3=true, F 6=F 2=free, produces the labelling of Fig. 4.
Fig. 4 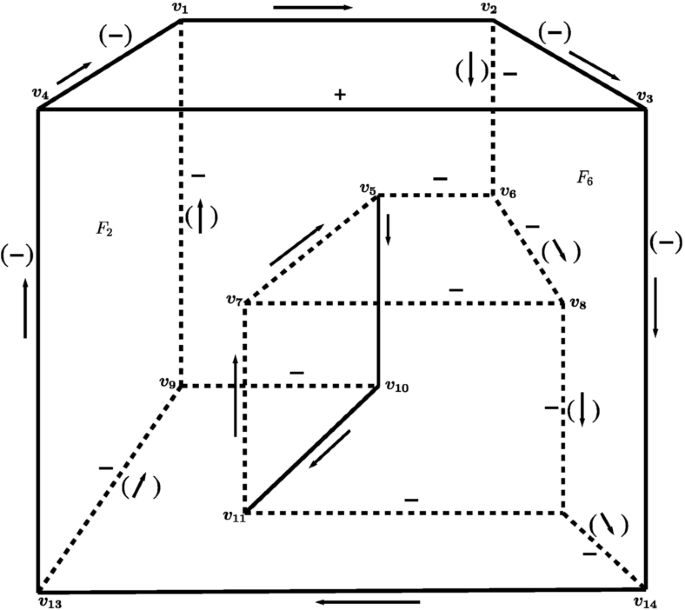
The labellings, which is based on the model T P , and the free variables F 2, and F 6
-
(3)
The truth assignment F 1=F 5=F 7=F 8=F 9=F 2=F 4=F 6=true, F 3=free, produces the labelling of Fig. 5.
Fig. 5 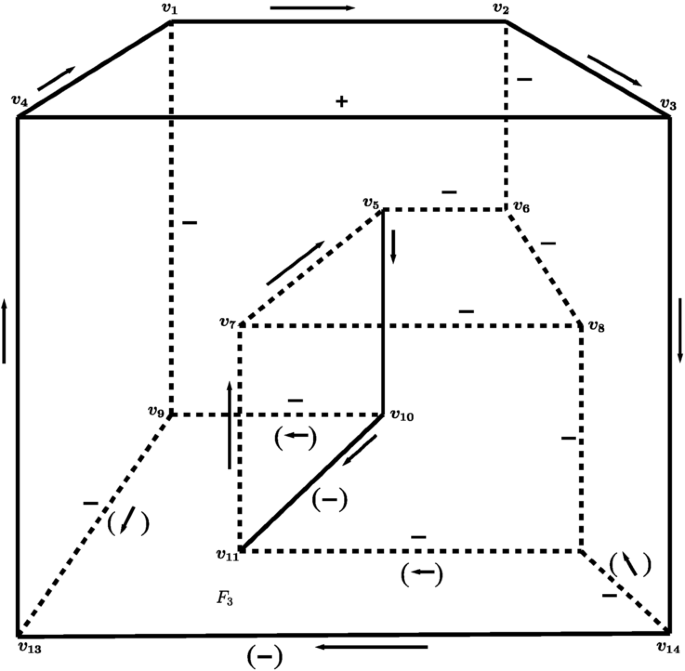
The labellings, which is based on the model T P , and the free variable F 3



1.1 A1: Figures

(a) The types of nodes, and the labels of the edges of a trihedral scene. (b) The legal labellings of possible trihedral nodes with hidden edges

The construction of the Boolean formula of the trihedral nodes in Fig. 12(c)

The construction of the Boolean formula of the trihedral nodes in Fig. 12(a)


The construction of the Boolean formula of the trihedral nodes in Fig. 12(b)

The construction of the Boolean formula of the trihedral nodes in Fig. 12(d)

The Boolean formulas of the 12 types of trihedral nodes of Fig. 6(b) are conjunctions of clauses with at most two literals

All realizations of a junction v–u imply that there is a unique rule of propagation (of the common variables F i , and F j ) associated with this junction

Another example of the construction of a rule of propagation

More examples of rules of propagation

More cases of adjacent nodes with the corresponding rule of propagation

Some cases of non-compatible junctions u–v of trihedral nodes. These junctions cannot accept a legal labelling

The use of propagation rules in a part of a picture P. The legal propagation of a Boolean formula F i occurs in the nodes of a planar circle B i =v 1,v 2,v 3,…,v 12, which is called the boundary of F i

An impossible polyhedral scene with a legal labelling. The boundary E j of variable F j is not a planar circle

A non labellable picture P, where its Boolean formula Φ P is satisfiable

The 12 types of trihedral nodes

The two representations of a picture P, which arise from a free variable F j . The only difference in these two labellings of P is in the labelling of the boundary B j of the variable F j

The three legal labellings, which correspond to the models of Table 1, that contain a free variable F p (F p is always defined in one angle between edges a and b). In each case, there are two legal labellings (I-labelling and E-labelling), which leave unchanged the label of the thirty edge c, which does not belong on the boundary of F p

The two legal labellings, which correspond to the models of Table 1, that contain a free variable. The I-labelling, and E-labelling leave unchanged the label of the edge (i.e., the edge d in the figure), which does not belong on the boundary of the free variable
Rights and permissions
About this article
Cite this article
Alevizos, P.D. Pictures as Boolean Formulas. J Math Imaging Vis 46, 74–102 (2013). https://doi.org/10.1007/s10851-012-0371-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10851-012-0371-x