
Abstract
Traditionally the danger cylinder is intimately related to the solution stability in P3P problem. In this work, we show that the danger cylinder is also closely related to the multiple-solution phenomenon. More specifically, we show that when the optical center lies on the danger cylinder, of the 3 possible P3P solutions, i.e., one double solution, and two other solutions, the optical center of the double solution still lies on the danger cylinder, but the optical centers of the other two solutions no longer lie on the danger cylinder. And when the optical center moves on the danger cylinder, accordingly the optical centers of the two other solutions of the corresponding P3P problem form a new surface, characterized by a polynomial equation of degree 12 in the optical center coordinates, called the deltoidal surface of danger cylinder (DSDC). This indicates the danger cylinder always has a companion deltoidal surface. For the significance of DSDC, we show that when the optical center passes through the DSDC, the number of solutions of P3P constraint system must change by 2, or DSDC acts as a delimitating surface of the P3P solution space. These new findings shed some new lights on the P3P multi-solution phenomenon, an important issue in P3P study.






Similar content being viewed by others

References
Grunert, J.A.: Das pothenotische problem in erweiterter gestalt nebst uber seine anwendungen in der geodasie. Grunerts Archiv fur Mathematik und Physik 1, 238–248 (1841)
Fischler, M.A., Bolles, R.C.: Random sample consensus: a paradigm for model fitting with applications to image analysis and automatic cartography. Graph. Image Process. 24(6), 381–395 (1981)
Jia, Q., Zheng, P., Sun, H.: The study of positioning with high-precision by single camera based on P3P algorithm. In: IEEE International Conference on Industrial Informatics, pp. 1385–1388 (2007)
Kneip, L., Scaramuzza, D., Siegwart, R.: A novel parameterization of the perspective-three-point problem for a direct computation of absolute camera position and orientation. In: IEEE Conference on Computer Vision and Pattern Recognition, pp. 2969–2976 (2011)
LI, S., XU, C.: A stable direct solution of perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 25(05), 627–642 (2011)
Linnainmaa, S., Harwood, D., Davis, L.S.: Pose determination of a three-dimensional object using triangle pairs. IEEE Trans. Pattern Anal. Mach. Intell. 10(5), 634–647 (1988)
Lowe, D.G.: Fitting parameterized three-dimensional models to images. IEEE Trans. Pattern Anal. Mach. Intell. 13(5), 441–450 (1991)
Nister, D.: A minimal solution to the generalized 3-point pose problem. J. Math. Imaging Vis. 27(1), 67–79 (2007)
Quan, L., Lan, Z.: Linear n-point camera pose determination. IEEE Trans. Pattern Anal. Mach. Intell. 21(7), 774–780 (1999)
Wu, Y.H., Hu, Z.Y.: PnP problem revisited. J. Math. Imaging Vis. 24(1), 131–141 (2006)
Haralick, R.M., Lee, C.N., Ottenberg, K.: Review and analysis of solutions of the three point perspective pose estimation problem. Int. J. Comput. Vis. 13(3), 331–356 (1994)
Gao, X.S., Hou, X.R., Tang, J., Cheng, H.F.: Complete solution classification for the perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 25(8), 930–943 (2003)
Thompson, E.H.: Space resection: failure cases. Photogramm. Rec. 5(27), 201–207 (1966)
Wolfe, W.J., Mathis, D., Sklair, C.W., Magee, M.: The perspective view of three points. IEEE Trans. Pattern Anal. Mach. Intell. 13(1), 66–73 (1991)
Zhang, C.X., Hu, Z.Y.: A general sufficient condition of four positive solutions of the P3P problem. J. Comput. Sci. Technol. 20(6), 836–842 (2005)
Zhang, C.X., Hu, Z.Y.: Why is the danger cylinder dangerous in the P3P problem? Acta Autom. Sin. 32(4), 504–511 (2006)
Sun, F.M., Wang, B.: A note on the roots of distribution and stability of the PnP problem. Acta Autom. Sin. 36(9), 1213–1219 (2010)
Rieck, M.Q.: An algorithm for finding repeated solutions to the general perspective three-point pose problem. J. Math. Imaging Vis. 42(1), 92–100 (2012)
Rieck, M.Q.: Solving the three-point camera pose problem in the vicinity of the danger cylinder. In: International Conference Computer Vision Theory and Applications, vol. 2, pp. 335–340 (2012)
Rieck, M.Q.: A fundamentally new view of the perspective three-point pose problem. J. Math. Imaging Vis. 48(3), 499–516 (2014)
Rieck, M.Q.: On the discriminant of Grunert’s system of algebraic equations and related topics. J. Math. Imaging Vis. 60(5), 737–762 (2018)
Wang, B., Hu, H., Zhang, C.X.: New insights on multi-solution distribution of the P3P problem. Image Vis. Comput. 103, 104009 (2020)
Acknowledgements
This work was supported by the National Natural Science Foundation of China under the Grant Nos. (61873264, 61772444, 61503004).
Author information
Authors and Affiliations
Corresponding author
Supplementary Information
Below is the link to the electronic supplementary material.
Appendix (About the Proof of Proposition 2)
Appendix (About the Proof of Proposition 2)
The 3 steps of the proof in Sect. 3.2 are detailed below:
Step 1
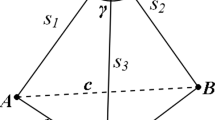
Around \(\left( {{s_{1d}},{s_{2d}},{s_{3d}}} \right) \), the first order differential relationship between \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{\phi _d}}\\ {\mathrm{d}{\varphi _d}}\\ {\mathrm{d}{\eta _d}} \end{array}} \right] \) and \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{s_{1d}}}\\ {\mathrm{d}{s_{2d}}}\\ {\mathrm{d}{s_{3d}}} \end{array}} \right] \) is:

As stated by Rieck [18], when the optical center lies on the danger cylinder, the rank of \(J_{11}\) is 2. So, by SVD decomposition of \(J_{11}\):
Substituting (A2) to (A1), we have:
From Eq. (A3), we have the following equation:
Then we define new terms \(f_1,f_2,f_3\), by:
By defining: \(\left[ {\begin{array}{*{20}{c}} {{\rho _1}}\\ {{\rho _2}}\\ {{\rho _3}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {v_{11}^T}\\ {v_{21}^T}\\ {v_{31}^T} \end{array}} \right] \! \!\left[ {\begin{array}{*{20}{c}} {{s_1}}\\ {{s_2}}\\ {{s_3}} \end{array}} \right] \) we have:
For \({f_i}({i = 1,2,3})\), around \(\left( {{s_{1d}},{s_{2d}},{s_{3d}}} \right) \) by making a second order differential approximation, we have:
Based on Eq. (A4), we further define:
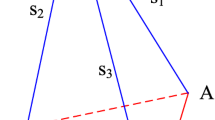
As shown in Fig. 6, \({O_c}\), with \(\left( {{s_{1c}},{s_{2c}},{s_{3c}}} \right) \), lying on DSDC, is another solution to the P3P problem, corresponding to the solution \({O_d}\). For the optical center, around \({O_c}\), we have the differential constraints:
The difference between Eqs. (A5) and (A6), is that \(J'\) is a full rank matrix. So, for any full rank linear transformation of \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{h_{1c}}}\\ {\mathrm{d}{h_{2c}}}\\ {\mathrm{d}{h_{3c}}} \end{array}} \right] \), the generated 3 new differential constraints must all contain the first order of \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{\rho _{1c}}}\\ {\mathrm{d}{\rho _{2c}}}\\ {\mathrm{d}{\rho _{3c}}} \end{array}} \right] \). So, the Eq. (A6) can ignore the second order of \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{\rho _{1c}}}\\ {\mathrm{d}{\rho _{2c}}}\\ {\mathrm{d}{\rho _{3c}}} \end{array}} \right] \), and we have:
So, we get the conclusion: at the region nearby \(\left( {{s_{1c}},{s_{2c}},{s_{3c}}} \right) \), vector \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{h_{1c}}}\\ {\mathrm{d}{h_{2c}}}\\ {\mathrm{d}{h_{3c}}} \end{array}} \right] \) is linear with vector \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{\rho _{1c}}}\\ {\mathrm{d}{\rho _{2c}}}\\ {\mathrm{d}{\rho _{3c}}} \end{array}} \right] \).
Step 2
So, when \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{\rho _{1c}}}\\ {\mathrm{d}{\rho _{2c}}}\\ {\mathrm{d}{\rho _{3c}}} \end{array}} \right] \) approaches \({\left( {0,0,0} \right) ^T}\) in a fixed direction, \(\left[ {\begin{array}{*{20}{c}} {\mathrm{d}{h_{1c}}}\\ {\mathrm{d}{h_{2c}}}\\ {\mathrm{d}{h_{3c}}} \end{array}} \right] \) also approaches \({\left( {0,0,0} \right) ^T}\) in a fixed direction, defined as \(D = \left[ {\begin{array}{*{20}{c}} {{D_1}}\\ {{D_2}}\\ {{D_3}} \end{array}} \right] \). So, we have:
As Fact (II), when an optical center is nearby \(\left( {{s_{1c}},{s_{2c}},{s_{3c}}} \right) \), another triplet satisfying Eq. (1) whose optical center is nearby \(\left( {{s_{1d}},{s_{2d}},{s_{3d}}} \right) \), in the complex space, the imaginary part of which can be either nonzero or zero. The following equation always holds:
Step 3
So, we have:
Since both Eqs. (A9) and (A10) contain \(\mathrm{d}{\rho _{1d}}\) and \(\mathrm{d}{\rho _{2d}}\), all the higher order terms of \(\mathrm{d}{\rho _{1d}}\) and \(\mathrm{d}{\rho _{2d}}\) can be ignored in these two equations. And Eqs. (A9) and (A10) can be simplified as:
So, we have:
Equations (A13) and (A14) indicate \(\mathrm{d}{\rho _{1d}}\), \(\mathrm{d}{\rho _{2d}}\) and \(\mathrm{d}{\rho _{3d}}^2 \) are the infinitesimal quantities of the same order.
From the third equation of (A15), we have the following 2 cases:
Case (I): when \(\mathrm{d}{h_{3d}}/{H_{3d}}'\left( {3,3} \right) > 0\), \(\mathrm{d}{\rho _{3d}}\) have 2 real solutions;
Case (II): when \(\mathrm{d}{h_{3d}}/{H_{3d}}'\left( {3,3} \right) < 0\), \(\mathrm{d}{\rho _{3d}}\) have 2 imaginary solutions.
Note that Case (I) gives two real-valued triplets for the P3P problem, while Case (II) gives two complex-valued triplets. This means that when the optical center passes through the DSDC, a pair of real-valued triplets, which satisfy the constraint system (1), become a pair of complex-valued triplets, which also satisfy the constraint system (1), or vice versa, and hence the number of the P3P constraint system solutions always changes by 2. In addition, when the optical center moves on the DSDC, \(\mathrm{d}{h_{3d}}/{H_{3d}}'\left( {3,3} \right) = 0\), the 2 triplets degenerate into the same one in this case, which means the optical center lies on the danger cylinder, and a repeated P3P solution occurs.
Hence Proposition 2 is proved.
Rights and permissions
About this article

Cite this article
Wang, B., Zhang, C. & Hu, Z. The Role of the Deltoidal Surface in the Solution Variation of the P3P Problem. J Math Imaging Vis 64, 151–160 (2022). https://doi.org/10.1007/s10851-021-01062-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10851-021-01062-y