
Abstract
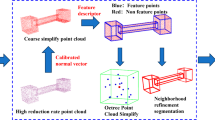
This work aims to obtain a sequence of 3D point clouds associated with a 3D object that reduces the volume data and preserves the shape of the original object. The sequence contains point clouds that give different simplifications of the object, from a very fine-tuned representation to a simple and sparse one. Such a sequence is important because it satisfies different needs, from a faithful representation with a low reduction of points to a significant data reduction that only preserves the main properties of the object. We construct the sequence in the following way. We first obtain a voxelization of the original 3D object. Then, we organize the voxels by slices to get a single chain code that represents the original 3D object. The point clouds depend on the key points of the chain code. The Hausdorff distance and the average geometric error prove that the point clouds are invariant under rigid rotations and maintain the shape of the object. Our results indicate that the proposed method has an average efficiency of 60% regarding the state-of-the-art simplification methods.

















Similar content being viewed by others

References
Cao C, Preda M, Zaharia T (2019) 3d point cloud compression: a survey. In: The 24th international conference on 3d web technology. Web3d ’19, pp 1–9, Association for Computing Machinery, New York, NY, USA. https://doi.org/10.1145/3329714.3338130
CGAL Computational Geometry Algorithms Library. http://www.cgal.org/
Chen Z, Liu L (2021) Navigable space construction from sparse noisy point clouds. IEEE Robot Autom Lett 6(3):4720–4727. https://doi.org/10.1109/LRA.2021.3068939
Chen S, Tian D, Feng C, Vetro A, Kovačević J (2017) Fast resampling of three-dimensional point clouds via graphs. IEEE Trans Signal Process 66(3):666–681
Chen S, Tian D, Feng C, Vetro A, Kovačević J (2018) Fast resampling of three-dimensional point clouds via graphs. IEEE Trans Signal Process 66(3):666–681. https://doi.org/10.1109/TSP.2017.2771730
El Sayed AR, El Chakik A, Alabboud H, Yassine A (2019) An efficient simplification method for point cloud based on salient regions detection. RAIRO-Oper Res 53(2):487–504
Fan H, Yang Y, Kankanhalli M (2021) Point 4d transformer networks for spatio-temporal modeling in point cloud videos. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp 14204–14213
Fan H, Yu X, Yang Y, Kankanhalli M (2021) Deep hierarchical representation of point cloud videos via spatio-temporal decomposition. IEEE Trans Pattern Anal Mach Intell
Freeman H (1961) On the encoding of arbitrary geometric configurations. IRE Trans Electron Comput EC-10(2):260–268. https://doi.org/10.1109/TEC.1961.5219197
Garcia DC, Fonseca TA, Ferreira RU, de Queiroz RL (2020) Geometry coding for dynamic voxelized point clouds using octrees and multiple contexts. IEEE Trans Image Process 29:313–322. https://doi.org/10.1109/TIP.2019.2931466
Golla T, Kneiphof T, Kuhlmann H, Weinmann M, Klein R (2020) Temporal upsampling of point cloud sequences by optimal transport for plant growth visualization. In: Computer Graphics Forum, vol 39, pp 167–179. Wiley Online Library
Good CD, Johnsrude IS, Ashburner J, Henson RNA, Friston KJ, Frackowiak RSJ (2001) A voxel-based morphometric study of ageing in 465 normal adult human brains. NeuroImage 14(1):21–36. https://doi.org/10.1006/nimg.2001.0786
Gu S, Hou J, Zeng H, Yuan H, Ma K-K (2019) 3d point cloud attribute compression using geometry-guided sparse representation. IEEE Trans Image Process PP:1–1. https://doi.org/10.1109/TIP.2019.2936738https://doi.org/10.1109/TIP.2019.2936738
Guo Y, Sohel F, Bennamoun M, Wan J, Lu M (2015) A novel local surface feature for 3d object recognition under clutter and occlusion. Inf Sci 293:196–213. https://doi.org/10.1016/j.ins.2014.09.015
Huang H, Li D, Zhang H, Ascher U, Cohen-Or D (2009) Consolidation of unorganized point clouds for surface reconstruction. ACM Trans Graph (TOG) 28(5):1–7
Huang T, Liu Y (2019) 3d point cloud geometry compression on deep learning. In: MM ’19: The 27Th ACM international conference on multimedia, pp 890–898. https://doi.org/10.1145/3343031.3351061
Huiyan H, Xie H, Fusheng S, Chunyan H (2015) Point cloud simplification with preserved edge based on normal vector. Optik - Int J Light Electron Opt 126(19):2157–2162. https://doi.org/10.1016/j.ijleo.2015.05.092https://doi.org/10.1016/j.ijleo.2015.05.092
Ji C, Li Y, Fan J, Lan S (2019) A novel simplification method for 3d geometric point cloud based on the importance of point. IEEE Access 7:129029–129042
Junkun Q, Wei H, Zongming G (2019) Feature preserving and uniformity-controllable point cloud simplification on graph. In: 2019 IEEE International conference on multimedia and expo (ICME), pp 284–289. https://doi.org/10.1109/ICME.2019.00057
Kansal S, Madan J, Singh A (2013) A systematic approach for cad model generation of hole features from point cloud data. In: 2013 3rd IEEE International Advance Computing Conference (IACC), pp 1385–1393. IEEE
Kehl W, Milletari F, Tombari F, Ilic S, Navab N (2016) Deep learning of local rgb-d patches for 3d object detection and 6d pose estimation. In: Leibe B, Matas J, Sebe N, Welling M (eds) Computer vision – ECCV 2016, pp 205–220. Springer, Cham
Kim J, Im J, Rhyu S, Kim K (2020) 3d motion estimation and compensation method for video-based point cloud compression. IEEE Access 8:83538–83547
Klette R, Rosenfeld A (2004) Digital geometry: geometric methods for digital picture analysis. Morgan Kaufmann Publishers Inc., San Francisco, CA, USA
Krüsi P, Furgale P, Bosse M, Siegwart R (2017) Driving on point clouds: motion planning, trajectory optimization, and terrain assessment in generic nonplanar environments. J Field Robot 34(5):940–984
Leal E, Sanchez-Torres G, Branch-Bedoya JW, Abad F, Leal N (2021) A saliency-based sparse representation method for point cloud simplification. Sensors 21(13):4279
Lee M-y, Lee S-h, Jung K-d, Lee S-h, Kwon S-c (2021) A novel preprocessing method for dynamic point-cloud compression. Appl Sci 11 (13):5941
Liu H, Cong Y, Yang C, Tang Y (2019) Efficient 3d object recognition via geometric information preservation. Pattern Recogn 92:135–145. https://doi.org/10.1016/j.patcog.2019.03.025
Liu Z, Li Q, Chen X, Wu C, Ishihara S, Li J, Ji Y (2021) Point cloud video streaming: challenges and solutions. IEEE Netw 35(5):202–209. https://doi.org/10.1109/MNET.101.2000364
Liu X, Yan M, Bohg J (2019) Meteornet: deep learning on dynamic 3d point cloud sequences. In: Proceedings of the IEEE/CVF international conference on computer vision (ICCV)
Liu YK, žalik B (2005) An efficient chain code with huffman coding. Pattern Recogn 38(4):553–557. https://doi.org/10.1016/j.patcog.2004.08.017
Min P (Unknown Month 2004) Binvox. http://www.patrickmin.com/binvox. Accessed: 18 Feb 2022 and 09 Aug 2022
Muhammad S, Joono C, Y K, H C (2019) Fractal bubble algorithm for simplification of 3d point cloud data. J Intell and Fuzzy Syst 37:7815–7830. https://doi.org/10.3233/jifs-182742
Nguyen CHP, Choi Y (2018) Comparison of point cloud data and 3d cad data for on-site dimensional inspection of industrial plant piping systems. Autom Constr 91:44–52
Ning X, Wang Y, Meng W, Zhang X (2016) Optimized shape semantic graph representation for object understanding and recognition in point clouds. Opt Eng 55(10):1–14. https://doi.org/10.1117/1.OE.55.10.103111https://doi.org/10.1117/1.OE.55.10.103111
Nooruddin FS, Turk G (2003) Simplification and repair of polygonal models using volumetric techniques. IEEE Trans Vis Comput Graph 9(2):191–205
Pauly M, Gross M, Kobbelt LP (2002) Efficient simplification of point-sampled surfaces. In: IEEE Visualization, 2002. VIS 2002, pp 163–170. https://doi.org/10.1109/VISUAL.2002.1183771
Sánchez-Cruz H, Tapia-Dueñas OA, Cuevas F (2019) Polygonal approximation using a multiresolution method and a context-free grammar. In: Carrasco-Ochoa JA, Martínez-Trinidad JF, Olvera-López JA, Salas J (eds) Pattern Recognition, pp 261–270. Springer, Cham. https://doi.org/10.1007/978-3-030-21077-9_24
Shah SAA, Bennamoun M, Boussaid F (2016) A novel feature representation for automatic 3d object recognition in cluttered scenes. Neurocomputing 205:1–15. https://doi.org/10.1016/j.neucom.2015.11.019https://doi.org/10.1016/j.neucom.2015.11.019
Shah SAA, Bennamoun M, Boussaid F (2017) Keypoints-based surface representation for 3d modeling and 3d object recognition. Pattern Recogn 64:29–38. https://doi.org/10.1016/j.patcog.2016.10.028
Shiquan Q, Kun Z, Kai G (2019) Algorithm for point cloud compressing based on geometrical features. Int J Performability Eng 15:782
Siva S, Nahman Z, Zhang H (2020) Voxel-based representation learning for place recognition based on 3d point clouds. In: 2020 IEEE/RSJ International conference on intelligent robots and systems (IROS), pp 8351–8357. https://doi.org/10.1109/IROS45743.2020.9340992
Song H, Feng H-Y (2007) A point cloud simplification algorithm for mechanical part inspection. International Federation for Information Processing Digital Library; Information Technology For Balanced Manufacturing Systems; 220. https://doi.org/10.1007/978-0-387-36594-7_49
Song H, Feng H-Y (2007) Point-cloud simplification with bounded geometric deviations. Int J Comput Appl Technol 30(4):236–244. https://doi.org/10.1504/IJCAT.2007.017235
Song H, Feng H-Y (2009) A progressive point cloud simplification algorithm with preserved sharp edge data. Int J Advan Manuf Technol 45:583–592. https://doi.org/10.1007/s00170-009-1980-4
Szeliski R (2010) Computer vision: algorithms and applications, 1st edn. Springer, Berlin
Taha AA, Hanbury A (2015) An efficient algorithm for calculating the exact hausdorff distance. IEEE Trans Pattern Anal Mach Intell 37(11):2153–2163. https://doi.org/10.1109/TPAMI.2015.2408351
Tangelder JWH, Veltkamp RC (2004) A survey of content based 3d shape retrieval methods. In: Proceedings Shape Modeling Applications, 2004, pp 145–156. https://doi.org/10.1109/SMI.2004.1314502
Tapia-Dueñas OA, Sánchez-Cruz H (2021) Context-free grammars to detect straight segments and a novel polygonal approximation method. Signal Process Image Commun 116080:91. https://doi.org/10.1016/j.image.2020.116080
Thanou D, Chou PA, Frossard P (2016) Graph-based compression of dynamic 3d point cloud sequences. IEEE Trans Image Process 25(4):1765–1778. https://doi.org/10.1109/TIP.2016.2529506
Toledo L, De Gyves O, Rudomín I (2014) Hierarchical level of detail for varied animated crowds. Vis Comput 30(6):949–961
Vogiatzis G, Hernández C (2011) Video-based, real-time multi-view stereo. Image Vis Comput 29(7):434–441. https://doi.org/10.1016/j.imavis.2011.01.006
Wang L, Xu Y, Li Y (2018) A voxel-based 3d building detection algorithm for airborne lidar point clouds. J Indian Soc Remote Sens 47:349–358
Wei J, Xu M, Xiu H (2020) A point clouds fast thinning algorithm based on sample point spatial neighborhood. J Inform Process Syst 16(3):688–698
Yang Y, Li M, Ma X (2020) An advanced vehicle body part inspection scheme based on scattered point cloud data. Appl Sci 10(15):5379
Yang Y, Zhuang Y, Pan Y (2021) Multiple knowledge representation for big data artificial intelligence: framework, applications, and case studies. Front Inform Technol Electron Eng 22(12):1551–1558
Zou Y, Wang X, Zhang T, Liang B, Song J, Liu H (2018) Broph: An efficient and compact binary descriptor for 3d point clouds. Pattern Recogn 76:522–536. https://doi.org/10.1016/j.patcog.2017.11.029
Zuquete Guarato A, Quinsat Y, Mehdi-Souzani C, Lartigue C, Sura E (2018) Conversion of 3D scanned point cloud into a voxel-based representation for crankshaft mass balancing. International Journal of Advanced Manufacturing Technology. https://doi.org/10.1007/s00170-017-1319-5
Funding
Osvaldo A. Tapia-Dueñas was partially supported by CONACyT, CVU 781156. Hermilo Sánchez-Cruz was partially supported by Universidad Autónoma de Aguascalientes, grant PII22-5. Hiram H. López was partially supported by an AMS–Simons Travel Grant.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Tapia-Dueñas, O.A., Sánchez-Cruz, H. & López, H.H. 3D object simplification using chain code-based point clouds. Multimed Tools Appl 82, 9491–9515 (2023). https://doi.org/10.1007/s11042-022-13588-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-022-13588-3