
Abstract
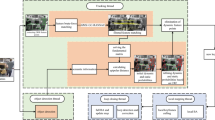
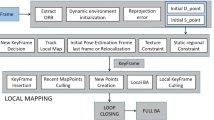
Semantic information associated Simultaneous Localization and Mapping (SIA-SLAM), a visual SLAM algorithm using semantic information association, is proposed to solve the problems that dynamic objects lead to the decreased accuracy of the localization and feature matching between two frames due to the lack of object semantic information. Firstly, a Solov2 instance segmentation network is used to obtain instance segmentation images, and the feature points are extracted from the RBG images simultaneously. Secondly, the feature points on dynamic objects are removed, and the semantic information of static objects is associated with the remaining feature points. Then, the static feature points are utilized to estimate the camera poses and update the static map point set. Finally, the camera poses are optimized by using closed-loop detection. When tracking the camera poses and inter-frame feature matching during the closed-loop detection, the semantic information of the feature points is checked first, and then the bag-of-words model is used for feature matching. The proposed SIA-SLAM algorithm is tested on the Technische Universität München (TUM) public dataset. As far as the absolute trajectory errors (ATE) are concerned, the Root Mean Square Errors (RMSE) and Standard Deviation (S.D.) improvement values can reach up to 98.15% and 98.18% in high dynamic scene of TUM dataset, respectively. The proposed SIA-SLAM algorithm is superior to other semantic SLAM algorithms which are tested in the specific datasets. Furthermore, the reliability and robustness of the SIA-SLAM algorithm are verified in a real scenario. The SIA-SLAM algorithm effectively improves the accuracy of the camera trajectory estimation and feature matching.









Similar content being viewed by others

Data availability
Yes.
Code availability
No (Not applicable).
References
Cadena C, Carlone L, Carrillo H (2016) Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans Robot 32(6):1309–1332
Davison AJ, Reid ID, Molton ND (2007) MonoSLAM: Real-time single camera SLAM[J]. IEEE Trans Pattern Anal Mach Intell 29(6):1052–1067
Klein G, Murray D (2007) Parallel tracking and mapping for small AR workspaces. 6th IEEE and ACM International Symposium on Mixed and Augmented Reality 225-234
Engel J, Koltun V, Cremers D (2018) Direct sparse odometry. IEEE Trans Pattern Anal Mach Intell 40(3):611–625
Forster C, Pizzoli M, Scaramuzza D (2014) SVO: Fast semi-direct monocular visual odometry. IEEE international conference on robotics and automation (ICRA) 15-22
Mur-Artal R, Tardós JD (2017) ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras. IEEE Trans Robot 33(5):1255–1262
Sharma K (2018) Improved visual SLAM: a novel approach to mapping and localization using visual landmarks in consecutive frames. Multimed Tools Appl 77(7): 7955-7976
Brasch N, Bozic A, Lallemand J (2018) Semantic monocular SLAM for highly dynamic environments. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 393-400
Wei H, Zhang T, Zhang L (2021) GMSK-SLAM: a new RGB-D SLAM method with dynamic areas detection towards dynamic environments. Multimed Tools Appl 80(21): 31729-31751
Zou D, Tan P (2012) Coslam: Collaborative visual slam in dynamic environments. IEEE Trans Pattern Anal Mach Intell 35(2): 354-366.
Li S, Lee D (2017) RGB-D SLAM in dynamic environments using static point weighting. IEEE Robot Autom Lett 2(4):2263–2270
Sun Y, Liu M, Meng M Q H (2017) Improving RGB-D SLAM in dynamic environments: A motion removal approach. Robot Autonom Syst 89: 110-122.
Yu C, Liu Z X, Liu X J (2018) DS-SLAM: A semantic visual SLAM towards dynamic environments. IEEE/RSJ International Conference on Intelligent Robots and Systems 1168-1174
Badrinarayanan V, Kendall A, Cipolla R (2017) SegNet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans Pattern Anal Mach Intell 39(12): 2481-2495
Bescos B, Fácil J M, Civera J (2018) DynaSLAM: Tracking, mapping, and inpainting in dynamic scenes. IEEE Robot Autom Papers 3(4): 4076-4083
He K, Gkioxari G, Dollár P (2017) Mask r-cnn. Proceedings of the IEEE international conference on computer vision 2961-2969
Zhong FW, Wang S, Zhang ZQ (2018) Detect-SLAM: Making object detection and SLAM mutually beneficial. IEEE Winter Conference Appl Comput Vision:1001–1010
Liu W, Anguelov D, Erhan D (2016) SSD: Single shot multibox detector. Lect Notes Comput Sci:21–37
Liu Y, Miura J (2021) RDS-SLAM: real-time dynamic SLAM using semantic segmentation methods. IEEE Access 9:23772–23785
Hempel, Thorsten, Ayoub Al-Hamadi (2022) An online semantic mapping system for extending and enhancing visual SLAM. Eng Appl Artificial Intell 111: 104830.
Bochkovskiy A, Wang C-Y, Liao H (2020) YOLOv4: Optimal speed and accuracy of object detection. ArXiv 10934.
Wang X, Zhang R, Kong T (2020) Solov2: Dynamic and fast instance segmentation. Adv Neural Inf Proces Syst 33:17721–17732
Rublee E, Rabaud V, Konolige K (2011) ORB: An efficient alternative to SIFT or SURF. 2011 International Conference on Computer Vision 2564-2571
Sturm J, Engelhard N, Endres F (2012) A benchmark for the evaluation of RGB-D SLAM systems. IEEE/RSJ international conference on intelligent robots and systems 573-580
Gálvez-López D, Tardos JD (2012) Bags of binary words for fast place recognition in image sequences. IEEE Trans Robot 28(5):1188–1197
Teng R, Liang Y, Zhang J B (2021) RS-SLAM: A Robust Semantic SLAM in Dynamic Environments Based on RGB-D Sensor. IEEE Sensors Journal 20657-20664
Lin T Y, Maire M, Belongie S (2014) Microsoft coco: Common objects in context. European conference on computer vision 740-755
Acknowledgements
This work was funded in part by the National Natural Science Foundation of China (62263031 and 61863033), and the Natural Science Foundation of Xinjiang Uygur Autonomous Region (2022D01C53).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest/Competing interests
No.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, Q., Yuan, J. & Kuang, B. SIA-SLAM: a robust visual SLAM associated with semantic information in dynamic environments. Multimed Tools Appl 83, 53531–53547 (2024). https://doi.org/10.1007/s11042-023-17650-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-023-17650-6