
Abstract
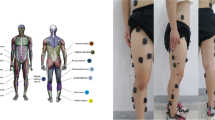
In this paper, a new technique for predicting human lower limb periodic motions from multi-channel surface ElectroMyoGram (sEMG) was proposed on the basis of least-squares support vector regression (LS-SVR). The sEMG signals were sampled from seven human lower limb muscles. Two channels sEMG were selected and mapped to muscle activation levels for angles estimation based on cross-correlation analysis. To deal with the time delay introduced by low-pass filtering of raw sEMG, a \(k\)-order dynamic model was derived to represent the dynamic relationship between the joint angles and muscle activation levels. The dynamic model was built by data driven LS-SVR with radial basis function kernel. The inputs of the LS-SVR are muscle activation levels, and the outputs are joint angles of the hip and knee. In experiments, 48 sEMG-angle datasets sampled from six healthy people were utilized to verify the effectiveness of the proposed method. Result shows that the human lower limb joint angles can be well estimated in different motion conditions.













Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Kamen G, Gabriel D (2009) Essentials of electromyography. Human Kinetics Publisher, Champaign
Bu N, Okamoto M, Tsuji T (2009) A hybrid motion classification approach for EMG-based human-robot interfaces using bayesian and neural networks. IEEE Trans Robot 25(3):503–511
Kim J, Mastnik S, Andre E (2008) EMG-based hand gesture recognition for real-time biosignal interfacing. In: Proceedings of the 13th international conference on Intelligent user interfaces, pp 30–39
Naik GR, Kumar DK (2010) Twin SVM for gesture classification using the surface electromyogram. IEEE Trans Inf Technol Biomed 14(2):301–308
Zhang Y, Xu XL, Luo Y (2012) An improved incremental online training algorithm for reducing influence of muscle fatigue in sEMG based HMI. In: International conference on robotics and biomimetics, pp 683–688
Li QL, Song Y (2012) sEMG control of an upper limb rehabilitation robot based on boosting of neural networks. In: IEEE international conference on mechatronics and automation, pp 428–433
Kiguchi K, Rahman MH, Sasaki M (2008) Development of a 3DOF mobile exoskeleton robot for human upper-limb motion assist. Robot Auton Syst 56:678–691
Fleischer C, Hommel G (2008) A human-exoskeleton interface utilizing electromyography. IEEE Trans Robot 24(4):872–882
Dollar AM, Herr H (2008) Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art. IEEE Trans Robot 24(1):145–158
Gopura RA, Kiguchi K, Li Y (2009) SUEFUL-7: a 7DOF upper-limb Exoskeleton robot with muscle-model-oriented EMG-based control. In: IEEE/RSJ international conference on intelligent robots and systems, pp 1126–1131
Terry KK, Arthur FT (2005) Feasibility of using EMG driven neuromusculoskeletal model for prediction of dynamic movement of the elbow. J Electromyogr Kinesiol 15(1):12–16
Hashemi J, Morin E, Mousavi P, Zaad KH (2011) Joint angle-based EMG amplitude calibration. In: The 33rd annual international conference of the IEEE EMBS, pp 4439–4442
Reddy NP, Gupta V (2007) Toward direct biocontrol using surface EMG signals: control of finger and wrist joint models. Med Eng Phys 29:398–403
Ngeo J, Tamei T, Shibata T (2012) Continuous estimation of finger joint angles using muscle activation inputs from surface EMG signals. In: The 34th annual international conference of the IEEE EMBS, pp 2756–2759
Wang SX, Gao YS, Zhao J, Yang T, Zhu YH (2012) Prediction of sEMG-based tremor joint angle using the RBF neural network. In: IEEE international conference on mechatronics and automation, pp 2103–2108
Shrirao NA, Reddy NP, Kouyri DR (2009) Neural network committees for finger joint angle estimation from surface EMG signals. Biomed Eng Online 8(2):1–11
Kwon S, Kim J (2011) Real-time upper limb motion estimation from surface Electromyography and joint angular velocities using an artificial neural network for human–machine cooperation. IEEE Trans Inf Technol Biomed 15(4):522–530
Hioki M, Kawasaki H (2009) Estimation of finger joint angles from sEMG using a recurrent neural network with time-delayed input vectors. In: IEEE international conference on rehabilitation robotics, pp 289–294
Zhang F, Li PF, Hou ZG (2012) sEMG-based continuous estimation of joint angles of human legs by using BP neural network. Neurocomputing 78:139–148
Bishop CM (1995) Neural networks for pattern recognition. Oxford University Press, Oxford
Vapnik V (1998) Statistical learning theory. Wiley, New York
Suykens JAK, Horváth G, Basu S (2003) Advances in learning theory: methods, models and application. IOS Press, Amsterdam
Suykens JAK, Van Gestel T (2002) Least squares support vector machines. World Scientific, Singapore
Suykens JAK, De Brabanter J, Lukas L, Vandewalle J (2002) Weighted least squares support vector machines: robustness and sparse approximation. Neurocomputing 48:85–105
Manal K, Gonzalez RV, Lloyd DG, Buchanan TS (2002) A real-time EMG-driven virtual arm. Comput Biol Med 32(1):25–36
Buchanan TS, Lloyd DG, Manal K, Besier T (2004) Neuromusculoskeletal modeling: estimation of muscle forces & joint moments and movements from measurements of neural command. J Appl Biomech 20(4):367–395
Acknowledgments
This research is supported in part by the National Natural Science Foundation of China (Grants #61175076 and #61005070) and the Fundamental Research Funds for the Central Universities (Grant #2012QJ01 and # 2014JBM014). The authors gratefully acknowledge the valuable contributions of anonymous reviewers for their helpful comments and suggestions towards improving the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Q.L., Song, Y. & Hou, Z.G. Estimation of Lower Limb Periodic Motions from sEMG Using Least Squares Support Vector Regression. Neural Process Lett 41, 371–388 (2015). https://doi.org/10.1007/s11063-014-9391-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-014-9391-4