
Abstract
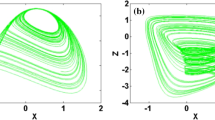
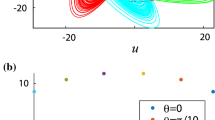
Since the definitions of the biological neuron model are similar to the oscillator structures, many control theorems are used in common with the biological neuron model. While the stability and the synchronization etc. control methods are frequently studied subject for these nonlinear systems, the “rotation-transition” concept draws attention in the recent studies dealing with nonlinear dynamical systems. The studies about the rotation-transition of the nonlinear systems are usually focused on the chaotic oscillator structures. On the other hand, the concept of the rotated attractor is also encountered in the dynamics of biological systems and there is no research about the rotation-transition of biological neuron models. In this study, the rotation-transition process of the Hindmarsh–Rose neuron model has been performed for the first time. In this context, firstly, the HR neuron model is converted to a rotated structure by using the Euler’s rotation theorem. Then, the characteristics outcomes of the rotated HR neuron model are analyzed by calculating the equilibrium points and Lyapunov exponents. The functionality of the rotated HR neuron model has been tested by the numerical simulation studies. Lastly, the rotated HR neuron model is implemented by using FPGA device. Briefly, this conversion process is modeled mathematically, then supported by the results of numerical simulations and finally verified by the results of the FPGA based experimental realizations. Thus, a phase control method for the dynamical attractor of a neuron model is achieved without the need for any coupling identification in this system.









Similar content being viewed by others

References
Korkmaz N, Öztürk İ, Kılıç R (2016) Multiple perspectives on the hardware implementations of biological neuron models and programmable design aspects. Turk J Electr Eng Comput Sci 24(3):1729–1746
Hodgkin A, Huxley A (1952) A quantitative description of membrane current and its application to conduction and excitation in nerve. J Physiol 117:500–544
Morris C, Lecar H (1981) Voltage oscillations in the barnacle giant muscle fiber. Biophys J 35:193–213
Wilson HR, Cowan JD (1972) Excitatory and inhibitory interactions in localized populations of model neurons. Biophys J 12(1):1–24
FitzHugh R (1969) Mathematical models for excitation and propagation in nerve. In: Schawn HP (ed) Biological engineering, vol 1. McGraw-Hill, New York, pp 1–85
Hindmarsh JL, Rose RM (1984) A model of neural bursting using three couple first order differential equations. Proc R Soc Lond B Biol Sci 221(1222):87–102
Izhikevich EM (2003) Simple model of spiking neurons. IEEE Trans Neural Netw 14(6):1569–1572
Belykh VN, Osipov GV, Kuckländer N, Blasius B, Kurths J (2005) Automatic control of phase synchronization in coupled complex oscillators. Phys D 200(1–2):81–104
Guevara Erra R, Perez Velazquez JL, Rosenblum M (2017) Neural synchronization from the perspective of non-linear dynamics. Front Comput Neurosci 11:98
Pecora LM, Carroll TL (1990) Synchronization in chaotic systems. Phys Rev Lett 64(8):821
Ijspeert AJ (2008) Central pattern generators for locomotion control in animals and robots: a review. Neural Netw 21:642–653
Barron-Zambrano JH, Torres-Huitzil C (2013) FPGA implementation of a configurable neuromorphic CPG-based locomotion controller. Neural Netw 45:50–61
Yu J, Tan M, Chen J, Zhang J (2014) A survey on CPG-insipired control models and system implementation. IEEE Trans Neural Netw Learn Syst 25(3):441–456
Murakami Y, Fukuta H (2002) Stability of a pair of planar counter-rotating vortices in a rectangular box. Fluid Dyn Res 31(1):1–12
Kim MY, Roy R, Aron JL, Carr TW, Schwartz IB (2005) Scaling behavior of laser population dynamics with time-delayed coupling: theory and experiment. Phys Rev Lett 94(8):088101
Lebedev MA, Ossadtchi A, Mill NA, Urpí NA, Cervera MR, Nicolelis MA (2019) Analysis of neuronal ensemble activity reveals the pitfalls and shortcomings of rotation dynamics. Sci Rep 9(1):1–14
Michaels JA, Dann B, Scherberger H (2016) Neural population dynamics during reaching are better explained by a dynamical system than representational tuning. PLoS Comput Biol 12(11):e1005175
Backhaus U, Schlichting HJ (1987) Regular and chaotic oscillations of a rotating pendulum. Chaos in Education II. Vesprem, Hungary. University of Munster, Munster, Germany, pp 312–317
Bhowmick SK, Bera BK, Ghosh D (2015) Generalized counter-rotating oscillators: mixed synchronization. Commun Nonlinear Sci 22(1–3):692–701
Sharma A, Dev Shrimali M, Kumar Dana S (2012) Phase-flip transition in nonlinear oscillators coupled by dynamic environment. Chaos 22(2):023147
Cruz JM, Escalona J, Parmananda P, Karnatak R, Prasad A, Ramaswamy R (2010) Phase-flip transition in coupled electrochemical cells. Phys Rev E 81(4):046213
Prasad A, Dana SK, Karnatak R, Kurths J, Blasius B, Ramaswamy R (2008) Universal occurrence of the phase-flip bifurcation in time-delay coupled systems. Chaos 18(2):023111
Skiadas CH, Skiadas C (2011) Chaotic modeling and simulation in rotation–translation models. Int J Bifurcat Chaos 21(10):3023–3031
Dai S, Sun K, He S, Ai W (2019) Complex chaotic attractor via fractal transformation. Entropy 21(11):1115
Wang M, Deng Y, Liao X, Li Z, Ma M, Zeng Y (2019) Dynamics and circuit implementation of a four-wing memristive chaotic system with attractor rotation. Int J Nonlinear Mech 111:149–159
Bhowmick SK, Ghosh D, Dana SK (2011) Synchronization in counter-rotating oscillators. Chaos 21(3):033118
Prasad A (2010) Universal occurrence of mixed-synchronization in counter-rotating nonlinear coupled oscillators. Chaos Solitons Fractals 43(1–12):42–46
Sayed WS, Radwan AG, Elnawawy M, Orabi H, Sagahyroon A, Aloul F, El-Sedeek A (2019) Two-dimensional rotation of chaotic attractors: demonstrative examples and FPGA realization. Circuits Syst Signal Process 38(10):4890–4903
Orabi H, Elnawawy M, Sagahyroon A, Aloul F, Elwakil AS, Radwan AG (2019) On the implementation of a rotated chaotic lorenz system on FPGA. In: IEEE Asia pacific conference on circuits and systems (APCCAS), Bangkok, Thailand, pp 417–422
Takagi S, Ueda T (2008) Emergence and transitions of dynamic patterns of thickness oscillation of the plasmodium of the true slime mold Physarum polycephalum. Phys D 237(3):420–427
Hargreaves EL, Yoganarasimha D, Knierim JJ (2007) Cohesiveness of spatial and directional representations recorded from neural ensembles in the anterior thalamus, parasubiculum, medial entorhinal cortex, and hippocampus. Hippocampus 17(9):826–841
Yoshikawa A, Yoshida M, Hirata Y (2004) Capacity of the horizontal vestibuloocular reflex motor learning in goldfish. In: The 26th annual international conference of the IEEE engineering in medicine and biology society, vol 1, pp 478-481, San Francisco, CA, USA
Dahasert N, Öztürk İ, Kiliç R (2012) Experimental realizations of the HR neuron model with programmable hardware and synchronization applications. Nonlinear Dyn 70(4):2343–2358
Korkmaz N, Öztürk İ, Kılıç R (2016) The investigation of chemical coupling in a HR neuron model with reconfigurable implementations. Nonlinear Dyn 86(3):1841–1854
Lin H, Wang C, Sun Y, Yao W (2020) Firing multistability in a locally active memristive neuron model. Nonlinear Dyn 100:3667–3683
Dtchetgnia Djeundam SR, Yamapi R, Filatrella G, Kofane TC (2015) Stability of the synchronized network of Hindmarsh–Rose neuronal models with nearest and global couplings. Commun Nonlinear Sci Numer Simul 22:545–563
Li CH, Yang SY (2015) Eventual dissipativeness and synchronization of nonlinearly coupled dynamical network of Hindmarsh–Rose neurons. Appl Math Model 39:6631–6644
Arfken GB, Weber HJ (1999) Mathematical methods for physicists, 6th edn. Elsevier Academic Press, Cambridge. ISBN 0-12-088584-0
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that she has no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Korkmaz, N. A Phase Control Method for the Dynamical Attractor of the HR Neuron Model: The Rotation-Transition Process and Its Experimental Realization. Neural Process Lett 53, 3877–3892 (2021). https://doi.org/10.1007/s11063-021-10568-w
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-021-10568-w