
Abstract
This paper addresses the issue of quality of service routing optimization within the Internet of Things networks. We particularly focus on the energy-aware and the lightweight aspects. By recognizing the relationship between lightweight and energy-aware routing, we set out to study their combined benefits. This study aims to enhance the Routing Protocol for Low Power and Lossy Networks by integrating energy-awareness and lightweight characteristics based on the Particle Swarm Optimization algorithm. Our approach addresses energy consumption, routing overhead and decision complexity in route establishment. The principal contributions include the introduction of an objective function that considers Expected Life Time, Delay and a new proposed metric Energy Aware-Expected Transmission Count. The improvement of the Long Short Term Memory predicting inertia weight based PSO with Online Gradient Descent that is used to optimize both the parent selection process and Trickle Timer mechanism. The controlled parent switching process to solve unnecessary and frequent changes. Our approach is validated through simulations in Contiki COOJA, with thorough comparisons with some existing protocols based on packet delivery ratio, average energy consumption, convergence time, control overhead, average end-to-end delay and average parent switching as performance metrics. The results reveal that our approach performs better. Depending on the protocol used for comparison, our approach reduced parent switching by 42.59–61.73%, convergence time by 20.31–66.06%, control overhead by 14.4–23.64%, energy consumption by 29.86–49.6%, end-to-end delay by 7.66–40.81% and increased packet delivery ratio by 2–42.92%.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, diverse technologies have continued to emerge and evolve. This new wave of advanced technologies has led many researchers to express their increased interest in the Internet of Things (IoT). As a result, many studies on this topic have been initiated, ushering in a new era of networking [1]. The hype around this paradigm stems from the fact that IoT-based solutions can be deployed quickly and efficiently. Conceptually, IoT represents the connection of intelligent devices (representing actuators and sensors) and systems to the internet [2], enabling advanced services for these devices through communication technologies [3]. As connected life advances, the number of connected objects increases and as they integrate various heterogeneous technologies, they raise problems of security, connectivity, data storage, data processing and routing. These concerns are directly related to the limited resources of IoT devices, such as energy, processing and storage capabilities [4]. Therefore, it is important to consider these limitations when building an IoT-based system. The applications of IoT extend across various domains, for example, in healthcare [5] and in smart city environments [6], where each addresses unique challenges and presents innovative solutions.
Network routing involves determining optimal traffic paths and ensuring the successful delivery of packets from their source to their intended destination within the network. In IoT routing, Quality of Service (QoS) refers to the network’s capability to deliver data efficiently while meeting many application requirements, such as energy efficiency, latency and Packet Delivery Ratio (PDR) [7]. Therefore, optimizing QoS routing stands out as one of the major issues in IoT networks and meeting the maximum QoS characteristics requires careful resource management. Energy-awareness and lightweight are part of the challenge of QoS routing optimization. With limited energy autonomy devices, energy efficiency becomes paramount. Therefore, QoS routing protocols must be designed to reduce energy consumption, consider dynamic energy constraints and use power-saving measures. Furthermore, because of the limited processing power and memory of IoT devices, lightweight QoS routing solutions are required. Balancing complexity and functionality, reducing overhead and ensuring rapid convergence are key factors in developing lightweight implementations. The relationship between these aspects is particularly evident in routing decisions where improving one aspect can affect the other. Implementing complex decision-making processes requires more resources, which could lead to increased energy consumption. Similarly, reducing some operations in routing decisions to limit energy usage could lead to less optimal path selection. Therefore, balancing energy-awareness and lightweight is extremely needed.
Since IoT has evolved from the internet, it tends to use internet routing protocols. However, using traditional routing protocols does not satisfy QoS routing in IoT. Against this background, IPv6 LoW Power Wireless Area Networks (6LoWPAN) and Routing Over Low power and Lossy networks (ROLL) developed an IP-based Routing Protocol for Low power and Lossy Networks called RPL [8]. RPL is a proactive routing protocol that organizes the network into one or more oriented trees, also called Destination Oriented Directed Acyclic Graph (DODAG), with a root DODAG. Control messages exchanged between nodes to establish and maintain the DODAG include DIS (DODAG Information Solicitation), DIO (DODAG Information Object), DAO (Destination Advertisement Object) and DAO-ACK (DODAG Advertisement Object Acknowledgement). The DIS message is used by a node to request DIO messages from its neighbors. These DIO messages contain items of information that help the node select its parent, such as the rank value, which represents a node's position in the network, with the root having the lowest rank and other nodes having increasing rank values as they get farther from the root. Once the parent is selected, the node transmits a DAO message to construct upward routes. The receipt of a DAO is confirmed by a DAO-ACK message. When changes occur in the network, nodes have the possibility to change their current parents by switching to other potential best parents. The transmission rate of DIO messages is controlled by the Trickle Timer algorithm. RPL introduces an objective function that adapts to any applicable metric, which makes it open to any changes. Application requirements and performance goals are the basis for the choice of routing metrics.
The flexibility of RPL's objective function enables the consideration of multiple routing metrics, naturally leading to a multi-objective optimization approach in routing. This capability is crucial in IoT networks, where competing QoS constraints such as energy efficiency, network reliability and latency must be balanced. To address these multi-objective problems, researchers have increasingly turned to metaheuristics, particularly Swarm Intelligence (SI) algorithms. These algorithms, which draw inspiration from natural phenomena, have demonstrated remarkable capabilities in solving complex optimization problems as in [9, 10]. In the literature, authors focused on refining routing in IoT. They proposed different approaches to enhancing energy efficiency [11, 12] or to making routing protocols lightweight [13, 14]. Each work has treated one aspect at a time. Recent efforts have focused on improving RPL. To improve energy efficiency, QoS-RPL was proposed [15], relying on the Ant Colony Algorithm (ACO) to locate the shortest path by considering the Remaining Energy (RE) and delay as routing metrics. They have been able to lessen energy usage and expand the network lifetime. However, a minor reduction in PDR is observed as well as an increase in communication messages overhead due to the ACO algorithm, which requires the nodes to exchange more information. To address QoS requirements, CQARPL was introduced [16]. This protocol considered RE, Expected Transmission Count (ETX), Buffer utilization and Hop Count (HC). It maintained energy efficiency and reliability. However, there is no discussion of potential overhead. L-RPL [17] was presented as a solution to achieve reliability. The aim is to keep track of global neighbor connections to ensure stable routes for longer distances. This method used a new metric called the Laplacian energy drop to assess links in paths and choose those with strong connectivity. This work was able to show enhancements in the network's performance when it comes to control overhead and reliability. Yet, it relied on extensive calculations. Heavy traffic can lead to a range of challenges like energy management. For adaptive and dynamic decision-making, LA-OF [18] came up with an outstanding technique using a machine learning algorithm. Each node learns about its surroundings and adjusts the ETX value as needed. This technique achieved more accurate link estimation in changing and unreliable environments. However, using only a single metric does not respond to the requirement of QoS. These proposed solutions either achieved energy efficiency at the cost of increased overhead or improved routing reliability through computationally intensive methods or considered one aspect without considering other QoS constraints. This realization has prompted several questions on how to achieve energy efficiency without increasing communication overhead, what mechanisms can ensure lightweight implementation while maintaining routing effectiveness and how to balance multiple QoS objectives without prioritizing one over the other. To address these challenges, we proposed a Lightweight Energy-Aware Routing Protocol for Low-Power and Lossy Networks (LEA-RPL) based on the Particle Swarm Optimization (PSO) algorithm [19]. Our approach focuses on achieving energy efficiency while maintaining a lightweight implementation that minimizes communication overhead. We employ an enhanced version of PSO along with QoS routing metrics to improve the parent selection process, frequency of parent switching and Trickle Timer algorithm.
2 Motivations and contributions
In RPL, we observed that the process of creating the topology consumes more energy, mostly because of the many messages shared between the nodes. This inevitably leads to overhead, especially in large networks. We aim to address these limitations by enhancing the standard RPL, so it becomes both energy-aware and lightweight without compromising on QoS requirements. Our approach LEA-RPL exploits the advantages of PSO, a well-known optimization technique for being relatively efficient and does not require the use of complex mathematical equations or sophisticated data structures compared to other metaheuristics. By integrating PSO logic for the first time in the parent selection process of RPL, we seek to lessen energy consumption during this process. To speed up the convergence of this process, we rely on a Long Short Term Memory (LSTM) predicting inertia weight based PSO [20], a variant of PSO. The contributions of this paper include the development of a new routing metric, Energy Aware-Expected Transmission Count (EA_ETX), which is an extension of Expected Transmission Count (ETX) that considers energy consumption during transmission, the improvements of the Long Short Term Memory predicting inertia weight based PSO using Online Gradient Descent (OGD) labeled (LSTMOGD_PSO) for weight computation in the fitness function of PSO, the proposal of a new objective function (LEA_OF), that considers QoS routing metrics, EA_ETX, Expected Life Time (ELT) and Delay to construct DODAG effectively, the control of frequent and unnecessary parent switching and the introduction of an enhanced Trickle Timer (PSO_Trickle).
2.1 Organization
The rest of this paper is structured as follows. Section 2 discusses the literature on improvements of RPL. Section 3 presents the proposed LEA-RPL. Section 4 provides the results and findings. Section 5 concludes the paper and sets out the future scope of LEA-RPL.
2.2 Related work
In the rapidly growing domain of the Internet of Things (IoT), an important number of studies have appeared, each suggesting approaches to enhance the Routing Protocol for Low Power and Lossy Networks (RPL). These studies target some critical aspects within Low Power and Lossy Networks (LLNs). In this section, we cover some of those aspects.
To meet the needs of energy optimization in LLNs, Mehbodniya et al. [21] presented the Fuzzy Logic Energy-Aware Routing Protocol (FLEA-RPL), which optimizes data routing in IoT networks by selecting the most suitable parent node based on metrics like Residual Energy (RE), Expected Transmission Count (ETX) and load. This protocol improved energy consumption, end-to-end delay and Network lifetime. However, there is no discussion or evaluation of overhead. In [22], Qasem et al. focused on reducing overhead by introducing a new routing metric using the number of child nodes. Then they integrated it into a new objective function called LB-OF along with ETX in order to balance the network. But, it does not take into account other metrics to achieve higher efficiency and was compared to the standard Objective Functions (OFs) only. For mobility scenarios, Maha et al. [23] created the Energy-efficient and Mobility Aware RPL (EMA-RPL). It integrates a prediction technique for new attachments based on the Received Signal Strength Information (RSSI). It showed an increase in Packet Delivery Ratio (PDR) and a more efficient performance than the default RPL. However, using only RSSI is not efficient. Gaston Lorente et al. [24] combined RPL multicast and the Stateless Multicast RPL Forwarding protocol (SMRF) [25], presenting a multicast protocol, named Bidirectional Multicast RPL Forwarding (BMRF), which offers an alternative to pick between link-layer broadcast and link-layer unicast based on a particular value. The protocol succeeded in reducing radio data transfer and energy consumption while achieving better PDR. However, these improvements have a downside, as there is an increase in memory usage and end-to-end delay. In [26], Hadaya and Alabady addressed the limitations of using only one routing metric in RPL. They aimed to improve energy efficiency by integrating three routing metrics, which are Load, RE and ETX. They were able to achieve improvement in packet loss ratio, energy consumption and PDR. However, the approach was not compared to other improvements of RPL and scalability is not assessed.
Even though RPL can handle many devices, it has issues with evenly distributing the load and can cause uneven data traffic, which uses up energy and compromises network performance. Addressing these concerns, Sebastian et al. [27] introduced a solution referred to as the load balancing RPL (lb-RPL). To ensure load balancing, lb-RPL presented a new routing metric called LBI (Level Battery Index) while also considering ETX and RE as routing metrics for parent selection. lb-RPL reduced the traffic overhead by 8% compared to RPL, but it does not fully resolve the control message overhead problem. In a similar initiative, Ghaleb et al. [28] presented the Load Balancing metric aware objective function (LBSR) in RPL-based IoT networks. The proposed approach considers the child count metric to achieve load balancing across nodes. In addition, the number of children and HC metrics were integrated for the optimal parent selection process. While this work highlights significant improvements in energy efficiency, it is clear that there is no consideration of potential overhead.
For efficient routing, Singh and Chen [29] set up an objective function called OF-ER in RPL. The authors combined link quality, queue size, network lifetime and the number of depleted nodes close to the ones picking the routes. The outcomes of this protocol are notable, showcasing improvements in network reliability, stability and overall network lifespan. Nevertheless, it is only compared with the standard OFs and scalability is not evaluated. Poorana Senthilkumar et al. [30] combine both link and node metrics to enhance RPL in a method called Weighted Sum Metrics Objective Function (WSM-OF). By selecting the best parent nodes and constructing a balanced DODAG topology, WSM-OF alleviated packet transmission and improved QoS. However, convergence time is not discussed. Alilou et al. [31] introduced an enhancement of RPL using a combination of Q-learning and Fisheye State Routing called QFS-RPL. This protocol dynamically adjusts to network changes and effectively manages the network load. It showed significant improvement in energy efficiency, PDR, overhead and latency. However, it displayed slightly similar performances than RPL in static conditions.
Charles et al. [32] proposed a Link Quality-Based Objective Function (LQBOF) that directly estimates link quality by combining the Link Quality Level (LQL) with ETX. LQBOF aims to provide more reliable routing tailored for applications requiring high data delivery ratios. However, other metrics need to be considered and overhead in large-scale networks should be managed. Rabet et al. [33] introduced Adaptive Control of Transmission Power for RPL (ACTOR) to optimize transmission power. This protocol used the Upper Confidence Bound (UCB) based reinforcement learning technique to dynamically adjust power management. The results showed improvements in energy consumption, latency and PDR. However, it only relies on ETX.
The enhancements of RPL extend beyond the refinement of objective functions and routing metrics, it includes improvements in the Trickle Timer algorithm. One approach is I-Trickle, suggested by Goyal and Chand [34]. It addressed critical issues in routing protocols, specifically targeting load balancing and energy consumption challenges. The algorithm introduces a key variable, denoted as s to effectively suppress DIO messages, thereby achieving improved load balancing and energy savings. However, an accumulation of packets within the network can lead to a bottleneck, consequently reducing the overall performance of the routing protocol. Lamaazi et al. [35] introduce FL-Trickle as a novel adaptation of the Trickle algorithm, with the goal of improving energy efficiency. The primary focus is on reducing convergence time and minimizing overhead in wireless networks. While the introduced flexible trickle interval showed potential, scalability and overall performance remain untested and need further exploration. Charles and Kalavathi [36] introduced the Attunement Trickle Algorithm, that aimed at determining the optimum reliability of RPL. The focus revolves around fine-tuning key parameters of the Trickle algorithm to achieve optimal values.
Table 1 gives an insight into the previous studies. They have made undeniable contributions to routing in LLNs, addressing the challenges of energy efficiency, QoS, reliability, overhead and network durability. These studies have explored techniques such as routing metrics selection, load balancing, energy efficiency, optimization techniques and Trickle Timer algorithm modifications. Despite the progress achieved by these studies, certain limitations persist, prompting the need for further enhancements. Notably, while some studies have strides in addressing one specific aspect at a time, a comprehensive integration of lightweight and energy-aware routing has not been explored yet. In this context, we propose Lightweight Energy-Aware RPL (LEA-RPL). Our contributions consist of introducing a novel objective function (LEA_OF) for effective DODAG construction, which uses the composite metrics (EA_ETX, ELT and Delay) along with our improved algorithm that combines a Long Short Term Memory predicting inertia weight based PSO and Online Gradient Descent (OGD), labeled LSTMOGD_PSO. We aim to refine routing decisions, providing a more comprehensive and adaptive outline. We also address the issue of parent switching. Additionally, we improve the Trickle Timer with our LSTMOGD_PSO (PSO_Trickle) in order to reduce overhead in the network. Our protocol exploits the rapid convergence facilitated by LSTM in conjunction with PSO, striving for a lightweight yet energy-efficient parent selection process.
3 Proposed LEA-RPL
In this section, we proceed into the details of our approach. We present LEA-RPL, an enhanced RPL protocol that integrates energy-awareness and lightweight characteristics. To reach our objective, we intervened at different levels:
-
1)
An objective function (LEA_OF) based on the LSTMOGD_PSO algorithm is developed.
-
2)
The parent switching mechanism is enhanced.
-
3)
A novel Trickle Timer algorithm utilizing LSTMOGD_PSO (PSO_Trickle) is proposed.
3.1 The objective function LEA_OF
The objective function is a set of rules that makes RPL flexible and adaptable to various LLN types. It aims to define routing metrics and then interpret them as a value called rank. The rank of a node Rank (Nd) is computed based on the rank of the parent Rank (Np) and the increment factor IncF, as shown in Eq. (1). IncF is computed using Eq. (2).
where \({R}_{f}\) is the rank factor to differentiate the links, \({S}_{p}\) is the step of the rank, which represents the link property of a neighbor and \({S}_{r}\) is the stretch of rank for selecting a parent. The Minimum Hop Rank Increase MHRI is equal to 256. The objective function also defines how the overall selection process and topology building works. There are two standardized OFs already defined by the Internet Engineering Task Force (IETF) for RPL.
Objective Function Zero (OF0), introduced as the default OF [40], prioritizes parents based on the shortest path to the DODAG root. However, relying solely on HC can end up leading to traffic congestion and unbalanced energy consumption. In this case, the values of the Eq. (2) are as follows: \(R_{f} = 1\), and \(S_{p} = 1\) and \(S_{r} = 0\).
Minimum Rank with Hysteresis Objective Function (MRHOF), utilizes hysteresis while selecting routes with the smallest metric value. This OF considers ETX and node residual energy [41]. For this objective function, \({R}_{f}\) = 1, \({S}_{r}\) = 0 and the value of \({S}_{p}\) is equal to 2 * ETX. MRHOF aims to find stable minimum ETX paths, ensuring network stability. The choice of MRHOF metrics has a major impact on RPL and the performance goal.
Our proposed objective function, LEA_OF, addresses the limitations of using only one routing metric. It combines a set of metrics using the fitness function of PSO and ensures a fuller and more balanced evaluation of the potential parents based on PSO logic. In the subsection that follows, we will introduce the routing metrics used, the rank computation and the process of parent selection.
3.1.1 Routing metrics
The step of choosing the right routing metrics is very important. When we use the appropriate metric, we can identify the optimal paths and nodes that meet our performance goals. The paths with reliable links can reduce latency and the need for retransmissions, which may affect overhead. The paths with low latency can reduce energy consumption. The network lifetime can be extended when nodes with high energy levels are prioritized. So, by combining different routing metrics, we can consider multiple aspects of network quality in a single routing decision. In our case, we focus on the following routing metrics.
3.1.2 EA_ETX
This metric is an extension of the Expected Transmission Count (ETX) metric. It combines the concept of energy consumption during transmission and the ETX metric. This EA_ETX metric is calculated using the Eq. (3).
where \({EC}_{tx\_rx}\) is the energy consumed during the transmissions and \(ET\) represents the total energy of a node. EA_ETX enables the selection of parents that not only provide good link quality (low ETX) but also minimize energy consumption during data transmissions.
3.1.3 ELT
This metric (Expected Life Time) is an indicator of a node’s energy level. It estimates the time it takes a node to deplete its energy reserves, as shown in Eq. (4). It aims to select parents with sufficient energy levels.
where \({E}_{Total(Nd)}\) the total amount of energy capacity of the node Nd. \({Ec}_{(Nd)}\) represents the amount of energy consumed. ELT guides the parent selection process towards nodes that are expected to have longer energy lifetimes.
3.1.4 Delay
This metric measures the time it requires for a packet to be delivered from a sender to a receiver. It is calculated as shown in Eq. (5).
where route j (i, d) is the route from i to d through j and Delay (l) is the end-to-end delay from source i to destination d passing through parent j over DIO. This metric helps to minimize latency, which can reduce energy consumption.
3.1.5 Parent selection process based on PSO technique
Particle Swarm Optimization (PSO) is a metaheuristic where populations self-organize like animals searching for food, following simple rules that simulate flocking or herding [19]. PSO stands out for its simple implementation, needing minimal setup effort. With few parameters to adjust, it simplifies optimization. Its ability for parallel computations enhances efficiency and handles complex problems robustly. PSO ensures high convergence without overlapping or mutation. It's known for low computational time and memory resources [42], which makes it align closely with the lightweight requirement of our work.
In PSO, the population of potential solutions is known as a swarm, where every individual solution is referred to as a particle. In a search space, each particle i has a position \({X}_{i}\), velocity \({V}_{i}\) and a fitness value, which is determined by a fitness function \({f}_{i}\). This function measures how good a particle solution is according to different objectives, as represented in Eq. (6).
Here, \({objective}_{k}\) is the specific objective to optimize, \({w}_{k}\) is the weight of importance and priority of the objective and Nk is the total number of objectives to optimize.
Particle motion toward optimal solutions is controlled by updating \({X}_{i}\) and \({V}_{i}\) using the given Eqs. (7) and (8).
where Pb, Pg are the personal and group best positions and c1, c2 are positive constants, a larger value of c1 allows exploration while a large value of c2 allows exploitation. r1 and r2 are random numbers in the range [0, 1]. In Eq. (7), c1r1(Pb(t)-\({X}_{i}\)(t)) is the cognitive term that takes only individual experience of the particle. Whereas c2r2(Pg(t)-\({X}_{i}\)(t)) is the social term that means the interaction between the particles and W ∈ [0.05,1] is the inertia weight that balances exploration and exploitation to boost convergence speed. Exploration enables particles to explore the unexplored search space, while exploration is the capacity to discover new solutions in the explored solution space. In early search, higher inertia weights are favored for exploration, while lower inertia weights are favored later for exploitation. Recent studies, such as the Long Short Term Memory (LSTM) predicting inertia weight based PSO [20] improved inertia weight computation strategy, by training an LSTM model with constant, random and linearly decreasing inertia weights.
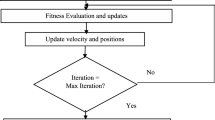
For our approach, we train our model with constant, random, linearly decreasing, logarithm decreasing and exponent decreasing inertia weights. As portrayed in Fig. 1, The process begins with random initialization of particle positions and velocities. The LSTM model is built and trained with the inertia weights strategies. Each particle's fitness is evaluated, then the Pb is set as the current position and the Pg as the particle position with the best fitness. The algorithm iterates, updating particle velocities and positions based on Eqs. (7) and (8) while updating Pb and Pg when better positions are found. At each iteration, the LSTM model predicts new inertia weight and the process continues until it reaches maximum iterations. In the LSTM model, the Input gate adds data about the current iteration and weight strategies, the Forget gate discards outdated weight patterns from less effective weight strategies and the Output gate outputs relevant patterns learned from effective weight strategies. The model learns to identify ineffective weights through the training process by analyzing the performance of different weight strategies across iterations and comparing predicted weights with the actual performance of the PSO algorithm.

Inertia weight prediction flowchart
In our protocol, to prevent the prioritization of one objective over another during the evaluation of particles, we propose LSTMOGD_PSO, that dynamically adjusts the weights present in the Eq. (6), using Online Gradient Descent (OGD), a light adaptive and dynamic technique [43]. OGD adjusts the weights based on observed gradients with respect to the defined objectives, ensuring a balanced optimization of the fitness function. The gradients represent the rate of change of each objective with respect to the weights, indicating how sensitive the fitness function is to changes in each weight. The Eq. (9) demonstrates the computation of the gradient for an objective k.
Here, \({prev\_objective}_{k}\) is the previous value of the objective. This gradient is then used in Eq. (10) to update the weight.
Here, \({w}_{k}\) represents the weight and \(\ss \) the learning rate, which helps control how much the weight changes.
By iteratively adjusting the weights based on the observed gradients, the algorithm aims to optimize the overall fitness function dynamically, ensuring a well-balanced optimization regarding the chosen objectives. This method helps the algorithm to react effectively to changes in the network conditions and the optimization objectives.
In the proposed LEA-RPL protocol, the network covers N nodes distributed randomly, constituting a DODAG structure. On a periodic basis, the DODAG root broadcasts control messages to its participating nodes or child nodes within the network. The participant nodes employ the enhanced LSTMOGD_PSO to select the optimal parent. In this context, each node in the network functions as a particle i, having attributes such as position (representing the current parent), velocity (indicating the potential parent), fitness value, a personal best (Pb) representing the best individual parent ever selected and a global best (Pg) representing the overall best parent in the network. This configuration enables a dual perspective, incorporating both a personal and a global view, enhancing the search process's ability to navigate the search space and identify the most efficient solution. The LSTMOGD_PSO unfolds in these general steps:
Initialization Phase: Each particle i ∈ N represents a potential parent node. The particles are distributed randomly all over the solution space. In this phase, the particles are initialized with positions and velocities along with PSO parameters and learning rate.
Evaluation Phase: In this step, each particle is evaluated based on a fitness function represented by \({f}_{i}\). The output of this function is the fitness value that provides the quality of the candidate based on the different routing metrics, as shown in Eq. (11).
Here, \({m}_{ik}\) for k = 1,…,3 are the values of the routing metrics, \({m}_{i1}\) = EA_ETX computed with Eq. (3), \({m}_{i2}\) = ELT computed with Eq. (4) and \({m}_{i3}\) = Delay computed with Eq. (5).
Also \({w}_{ik}\) for k = 1,…,3 are the weights associated with each routing metric and represent their relative importance in determining the overall fitness value of a particle, \({w}_{i1}\), \({w}_{i2}\), \({w}_{i3}\)∈ [0,1] and \({w}_{i1}\)+\({w}_{i2}\)+\({w}_{i3}\)=1. We represent the decision matrix of the selection of the potential parents, denoted DMP. This matrix consists of i particles that can be potential parents and k routing metrics m. The DMP matrix is presented as follows:
Here, \({m}_{ik}\) is the value of the \({k}^{th}\) routing metric of the \({i}^{th}\) particle. The \({m}_{ik}\) values are normalized based on whether the values should be minimized, as shown in Eq. (12), or maximized, as shown in Eq. (13).
OGD adjusts the weights based on observed gradients with respect to the chosen metric. The Eqs. (14) demonstrate the computation of the weights.
where,\(\ss = 0.01\) and \(\ss \) represents the learning rate. The gradient is computed based on the Eq. (15).
Here, \({prev\_m}_{ik}\) represent the previous values of the routing metrics.
After the fitness value computation using Eq. (11), the rank of particles is computed, as shown in Eqs. (1) and (2), where \({R}_{f}\) = 1 and \({S}_{r}\) = 0 and \({S}_{p}= 1-{f}_{i}\).
Particle update phase: As the particles explore the search space, they adjust their velocities and positions. The update of their positions and velocities is based on the PSO mechanism, which is guided by both personal experiences (Pb) and global experiences (Pg) using Eqs. (7) and (8).
Parent selection phase: As shown in Fig. 2, if it is the particle’s first time receiving a DIO message, it compares its rank with the sender’s rank and selects the sender as the preferred parent if its rank is lower. The particle then updates its DIO message and broadcasts it. If it is not the first DIO, the particle adds the sender as a potential parent and computes the fitness value using the Eq. (11). If the potential parent is better, it updates its particle to use the potential parent as a parent and updates the DIO before broadcasting it. This process continues until the DODAG is built.

Parent selection process using LSTMOGD_PSO
3.1.6 Complexity analysis of LSTMOGD_PSO
The time complexity of LSTMOGD_PSO is given below. The algorithm works in four phases and the complexity of each phase is as follows: (1) the complexity of the initialization phase is O(N ∗ K), (2) the evaluation phase, here OGD is integrated but does not have an iterative process it only updates the weights based on previous routing values, so the time complexity is O(N ∗ K), (3) the update phase, in this phase the particles update their positions and velocities using the pre-computed inertia weights. Since the inertia weights are retrieved directly without iterative computation or updates in this phase, the time complexity is O(N) and (4) the parent selection phase, its time complexity is O (N ∗ K). So, the time complexity of LSTMOGD_PSO is O(N ∗ K). N is the number of particles in the swarm and K is the number of tasks.
3.2 Parent switching
Parent switching is the process that allows a node to switch to a new parent node within the DODAG. This happens when the node finds out that its current parent is not the best choice and no longer optimal for routing. The reasons for this change can be the degradation in link quality, the high power consumption or the changes in the overall network topology [44]. In traditional objective functions, the parent selection may happen sporadically, at various time intervals, or DIO message updates. This is due to the lack of load balancing methods, which can lead to an unstable network and frequent parent switching.
To address this limitation, in our proposed LSTMOGD_PSO approach, the selection of the preferred parent nodes is based on a fitness value, which helps avoid selecting another parent again unnecessarily. Therefore, reducing the frequency of parent changes. We also used adaptive weights to optimize the fitness function, as shown by Eq. (11). This provides a more controlled and balanced parent selection process. Our approach incorporates both a global perspective (Pg) and a personal perspective (Pb) of each node. This dual view enhances the decision-making process, ensuring both individual and collective optimization.
In addition to the fitness value, we integrate in our approach a load metric based on the child node count computed for each parent, as presented in [45]. The goal here is to control the number of child nodes for each parent and keep the network balanced by preventing any parent from being overloaded with too many child nodes. The use of this metric ensures a proper parent switch, by avoiding the selection of parents that already have a high number of child nodes and exceed the maximum number of predefined children.
3.3 Trickle timer
To improve the Trickle Timer algorithm, we proposed a dynamic approach that adapts the Trickle Timer based on network conditions. RPL’s Trickle Timer balances network stability and energy efficiency by controlling how often DIO messages are sent. It uses parameters like the smallest interval Imin, the largest interval Imax, the current interval size I, the count of DIO messages received during the current interval c and the redundancy constant k, where k denotes how many DIO messages need to be received during the current interval to stop sending more DIO messages [46].
Despite its advantage, the Trickle Timer has some noticeable limitations; the parameters remain fixed, limiting adaptability to changes. Unfair distribution of transmissions can occur, leading to congestion and potential packet drops. Additionally, the interval settings affect network convergence and overhead, too long intervals harden convergence and cause overhead, while too short intervals result in suboptimal usage. Our approach integrates PSO into the Trickle Timer to optimize its performance, originally used for the parent selection process, it extends its functionality to dynamically adjust Trickle Timer parameters based on network conditions. It is called PSO_Trickle and is detailed in Algorithm 1. The process begins with initializing the interval size I to Imin and scheduling the DIO message transmissions at a randomly selected time within the interval. During this interval, the algorithm evaluates the consistency of the DIO messages and updates the message count c as needed. When the c value exceeds the redundancy constant k further transmissions are suppressed, otherwise the transmissions continue. After that, the algorithm updates to a new interval by employing the fitness value obtained during LSTMOGD_PSO execution, which reflects the quality of the selected parent node. Specifically, if the fitness value is not optimal which indicates suboptimal network conditions, we extend the transmission interval I based on the fitness value and a scaling adjustment γ. Conversely, if the fitness value suggests optimal network conditions, a shorter transmission interval will be set. This helps the network react more quickly to changes.

Pseudo algorithm of PSO_Trickle
4 Simulation results and discussions
In this section, we take a look into the outcomes of our simulation experiments, analyzing the performance of the LEA-RPL protocol under certain conditions and configurations through COOJA simulator [47]. We first detail the environment setup. We then define the performance metrics used in the simulations. At last, we discuss the results obtained by comparing LEA-RPL to the RPL standard with both default objective functions (OF0, MRHOF) and to some proposed approaches such as LB-OF [22], LQBOF [32] and WSM-OF [30].
4.1 Environment setup
The simulated environment was designed to mimic a typical IoT network scenario. We deployed different scenarios of network topology ranging from 10 to 100 nodes arranged in a random pattern to observe the effects of changing the number of nodes in the network. The communication range between nodes was set to 50 m, ensuring adequate connectivity. The simulation duration was set to 1 h, providing sufficient time to observe network behavior and performance trends. Table 2 details the simulation parameters used. The experiments were conducted on a system with an AMD Ryzen 5 processor and 16 GB of RAM. The cognitive coefficient c1 and social coefficients c2 of PSO are equal to 2.
Figure 3 gives an example of a network view of the implementation of LEA-RPL in COOJA simulator. We can see the mote output of a simulation of 20 nodes. We can get different information from those prints by writing PERL or Python scripts in order to compute the performance metrics.

Network view of LEA-RPL implementation in the COOJA simulator
4.2 Performance metrics
To evaluate the efficiency and effectiveness of the proposed LEA-RPL protocol, we used the following metrics:
-
Packet Delivery Ratio (PDR): Measures the ratio of successfully delivered packets to the total number of packets sent, indicating the reliability of data transmission. Computed with Eq. (16).
\(PDR=(\sum Packets\_Received/\sum Packets\_Sent)\)* 100 (16).
-
Average Energy Consumption: Quantifies the energy expended by the N nodes of the network during simulation time as illustrated by Eq. (17), providing insights into network efficiency and resource utilization.
$$Average Energy Consumption = {{\sum }_{Nd=1}^{N}{E}_{Consumption }(Nd)}/ RunTimeSimulation$$(17)where \({E}_{Consumption }(Nd)\) is the consumed energy by each node Nd and
$${E}_{Consumption }(Nd)= {E}_{Transmission }+{E}_{Reception }+{E}_{CPU}+{E}_{IdleMode}$$ -
Convergence Time (CT): Refers to the duration required for the network to stabilize and converge to a steady state. Computed with Eq. (18).
$$CT={Time}_{{Last Control Message}_{(DIO)}}-{Time}_{{First Control Message}_{(DIO)}}$$(18) -
Control Overhead (CO): Measures the overhead associated with control message transmissions, as depicted in Eq. (19) influencing network lightness and resource consumption.
$$CO =(\sum Control\_Message\_Packets /\sum Data\_Packets) *100$$(19) -
Average Parent Switching: Tracks the occurrence and impact of parent node changes within the network, affecting routing efficiency and stability. It measures the average parent switching event among all node densities.
-
Average end-to-end delay: evaluates the time required for transmitting data successfully from nodes to the root. Computed with Eq. (20).
$$ Average end - to - end delay = {\raise0.7ex\hbox{${\mathop \sum \nolimits_{i = 1}^{n\_packets} TR_{i} - TS_{i} }$} \!\mathord{\left/ {\vphantom {{\mathop \sum \nolimits_{i = 1}^{n\_packets} TR_{i} - TS_{i} } {n\_packets}}}\right.\kern-0pt} \!\lower0.7ex\hbox{${n\_packets}$}} $$(20)where \(TR_{i}\) is the time when packet i is received, \(TS_{i}\) is the time when packet i is sent and \(n\_packets\) is the total number of packets.
4.3 Simulation results
In this section, we present the simulation findings depicted by Figs. 4, 5, 6, 7, 8, 9, 10 and 11, we also analyze the performance of the improved PSO with inertia weight of LSTM compared to other algorithms and the performance of our LEA-RPL protocol against the proposed approaches mentioned above.

Convergence comparison using sphere function

Convergence comparison using rastrigin function

Average parent switching for OF0, MRHOF, LB-OF, WSM-OF and LEA-RPL

Convergence time vs number of nodes

Control overhead vs number of nodes

Packet delivery ratio vs number of nodes

Average energy consumption vs number of nodes

Average end-to-end delay vs number of nodes
Figure 4 and Fig. 5 illustrate the performance of four optimization algorithms, the Standard PSO, the improved PSO with inertia weight of LSTM, the Genetic Algorithm (GA) and Spider Monkey Optimization (SMO) on the Rastrigin and Sphere benchmark functions. The algorithms’ convergence rates were evaluated for 100 iterations with a 100 population size using the Sphere function and for 200 iterations with a 200 population size using the Rastrigin function. In both cases, PSO with inertia weight of LSTM showcases better exploration resulting in faster convergence.
Figure 6 shows that LEA-RPL has the lowest number of parents switching events, indicating a stable and reliable network with minimal need for nodes to change their parent nodes. WSM-OF and LB-OF show moderate levels of parent switching. Although these methods work reasonably well, they still lead to more changes in the parent node than LEA-RPL. MRHOF and OF0 demonstrate even higher numbers of parent switching events, declaring that these approaches may deal with more frequent changes, potentially impacting network stability and efficiency. LEA-RPL’s ability to minimize parent switching events can be attributed to its improved parent selection process, which incorporates a carefully designed fitness function, adaptive weights assignment and the control of the number of children of parents.
Figure 7 illustrates that as the number of nodes increases, the convergence time for all approaches shows an upward trend, primarily due to the growing number of control messages exchanged before network convergence is achieved. The proposed LEA-RPL demonstrates the best convergence time performance across all network sizes, next follows LQBOF and then MRHOF. OF0 has the highest convergence time. The minimized parent switching events of LEA-RPL contribute to its fast convergence time. Indeed, by favoring stable parent nodes during the parent selection process and avoiding unnecessary parent switching, LEA-RPL ensures consistent routing paths, which accelerates convergence. Also, the integration of the improved PSO technique helps explore the solution space to converge on optimal routing solutions, which impact positively on the convergence time.
Figure 8 shows that LEA-RPL consistently maintains lower control overhead across all network sizes compared to the other approaches, effectively managing control traffic and showcasing its ability to handle network scalability. Both WSM-OF and LB-OF start with higher overhead compared to the other protocols. However, both show a fluctuating decrease compared to OF0 and MRHOF, indicating moderate efficiency in handling control traffic as the network scales. LB-OF demonstrates better performance than WSM-OF as the network grows. OF0 and MRHOF display significant increases in control overhead, particularly in larger networks compared to the other protocols, suggesting inefficiencies in managing control traffic as the network expands. The lower control overhead of LEA-RPL is a direct result of its efficient parent selection mechanism, its reduced parent switching and the enhanced Trickle Timer (PSO_Trickle), which dynamically adjusts the interval I based on fitness values derived from QoS-related metrics, such as EA_ETX, ELT and Delay. These features minimize unnecessary control message exchanges, thereby reducing overall control overhead.
Figure 9 indicates that LEA-RPL outperforms the other approaches, consistently achieving high PDR values and demonstrating its effectiveness in ensuring reliable data delivery. LEA-RPL outperforms OF0, MRHOF, LB-OF and LQBOF which itself demonstrates high PDR. While WSM-OF shows higher PDR compared to some other approaches, LEA-RPL surpasses it in most cases. However, in the case of 100 nodes, WSM-OF outperforms LEA-RPL, which could be attributed to the spatial dynamics of the deployment area, where WSM-OF operates within a more compact space (100 m × 100 m) than our space area which is (200 m x 200 m). Overall, the PDR results demonstrate that LEA-RPL's fitness value allows it to maintain reliable data delivery, outperforming traditional single metric approaches and some other composite metrics, especially in dense networks where congestion is higher. This can be attributed to its decreased control overhead and reduced parent switching. By maintaining stable parent nodes and minimizing unnecessary changes, LEA-RPL ensures consistent and efficient data paths.
Figure 10 shows that LEA-RPL has the lowest average energy consumption, even when the network expands. These results highlight the effectiveness of LEA-RPL in optimizing energy usage and promoting energy-efficient routing. OF0 demonstrates the highest average energy consumption among all protocols, followed by MRHOF. These findings suggest that OF0 and MRHOF may impose higher energy demands on nodes, potentially leading to faster depletion of energy resources and reduced network lifetime. Next follows LB-OF and then WSM-OF, both show lower average energy consumption compared to OF0 and MRHOF. LEA-RPL's energy efficiency is achieved through a combination of factors, including efficient parent selection based on the fitness value, reduced control overhead, minimized parent switching and convergence toward a stable topology along with the protocol's ability to ensure PDR and avoid retransmissions.
Figure 11 shows that LEA-RPL achieves the lowest average end-to-end delay, especially as the network size increases. LQBOF also maintains relatively low delays at smaller network sizes but faces a noticeable increase as the network density grows beyond 50 nodes. In contrast, OF0 shows the highest delay across all densities, followed by MRHOF. These results demonstrate the effectiveness of LEA-RPL in handling communications in the network, this reduction of delay is attributed to the chosen routing metrics in the selection strategy. By employing EA_ETX, the protocol ensures reliable and energy efficient links. This minimizes retransmissions and associated delays. The delay metric ensures that the selected paths prioritize low latency. The integration of OGD further enhances the selection process by dynamically balancing the importance of each routing metric.
The results across Fig. 6, 7, 8, 9, 10, 11 address the research questions mentioned in the introduction section, regarding energy efficiency, communication overhead reduction and QoS optimization in LLNs. For the first research question on achieving energy efficiency without increasing communication overhead, LEA-RPL demonstrated noticeable improvements by reducing energy consumption by 49.6% compared to OF0, 37.08% MRHOF, 34% LB-OF and 29.86% WSM-OF, while simultaneously maintaining minimal control overhead with reductions of 23.64% compared to OF0, 21.83% LB-OF, 20.18% MRHOF and 14.40% WSM-OF.
As for the second research question concerning lightweight implementation while maintaining routing effectiveness, LEA-RPL achieved better performance through significantly reduced convergence times, showing improvements of 66.06% compared to OF0, 41.04% MRHOF and 20.31% LQBOF, joined with minimal parent switching events with reductions of 61.73% compared to OF0, 57.53% MRHOF, 47.46% LB-OF and 42.59% WSM-OF.
Addressing the balance of multiple QoS objectives was answered through LEA-RPL's ability to maintain successful packet delivery and low latency while achieving energy efficiency and lower overhead, demonstrated by PDR improvements of 42.92% over OF0, 20.52% over MRHOF, 13.35% over LB-OF, 9.64% over LQBOF and 2% over WSM-OF, with average end-to-end delay improvements of 7.66% over LQBOF, 27.89% over MRHOF and 40.81% over OF0.
5 Conclusion
In this study, we have come to the conclusion that even though lightweight and energy-aware characteristics in routing depend on one another, they can also affect each other negatively. Lightweight routing needs simple decisions and reduced overhead, which often means making less informed decisions. Energy-aware requires gathering information about energy levels and calculating paths based on energy constraints, which can make the routing decisions complex and can cause overhead. Therefore, the challenge of our research was to find the right balance between the two.
Our suggested LEA-RPL implements lightweight and energy-aware routing to enhance the Quality of Service in the Internet of Things networks. We proposed an objective function (LEA_OF), using Energy Aware-Expected Transmission Count (EA_ETX), Expected Life Time (ELT) and Delay metrics. We enhanced decision-making regarding the parent selection process using LSTMOGD_PSO, which is a Long Short Term Memory predicting inertia weight based PSO algorithm that we have improved by adding Online Gradient Descent (OGD). Furthermore, we controlled parent switching issues and we also addressed overhead using a proposed Trickle Timer (PSO_Trickle).
The outcomes of the simulation show that LEA-RPL outperforms other approaches, including LB-OF, WSM-OF, LQBOF, RPL with OF0 and MRHOF across multiple performance metrics. LEA-RPL achieves high packet delivery ratios, proving that it can reliably deliver data. LEA-RPL seems to have faster convergence times and minimized average end-to-end delay. The protocol also reduces control overhead and parent switching events, making the network more efficient and stable. Furthermore, LEA-RPL consumes less energy compared to the other approaches, which contributes to energy efficiency and extended network lifetime. This evaluation shows that LEA-RPL can effectively balance lightweight and energy-aware routing to optimize Quality of Service for the Internet of Things networks. In the future, further research on the applicability of LEA-RPL in different scenarios and environments of IoT applications will be very helpful with insights for further refinement and optimization like congestion and mobility evaluations.
Data availability
Data will be available upon request.
References
Walia, Guneet & KUMAR, MOHIT & Gill, Sukhpal Singh. (2023). AI-Empowered fog/edge resource management for IoT applications: A Comprehensive review, research challenges and future perspectives. IEEE communications surveys & tutorials. PP. 1–1. https://doi.org/10.1109/COMST.2023.3338015.
Karaduman, B., Oakes, B. J., Eslampanah, R., Denil, J., Vangheluwe, H., & Challenger, M. (2022). An Architecture and Reference Implementation for WSN-Based IoT Systems: In P. Y. Taser (Ed.), Emerging Trends in IoT and Integration with Data Science, Cloud Computing, and Big Data Analytics: (pp. 80–103). IGI Global. https://doi.org/10.4018/978-1-7998-4186-9.ch005
Kumar, P., Chauhan, N., Kumar, M., & Awasthi, L. K. (2023). Clustering based opportunistic traffic offloading technique for device-to-device communication. International Journal of System Assurance Engineering and Management., 14(Suppl 3), 827–39.
Alrajeh, N. A., Khan, S., Lloret, J., & Loo, J. (2013). Secure routing protocol using cross-layer design and energy harvesting in wireless sensor networks. International Journal of Distributed Sensor Networks, 9(1), 374796. https://doi.org/10.1155/2013/374796
Verma, P., Shaikh, T. A., Sood, S. K., Kaur, H., Kumar, M., Huaming, W., & Gill, S. S. (2024). Fuzzy-centric fog–cloud inspired deep interval Bi-LSTM healthcare framework for predicting yellow fever outbreak. IEEE Transactions on Fuzzy Systems, 32(10), 5508–5519. https://doi.org/10.1109/TFUZZ.2024.3412197
Malik, A., Singh, S., Manju, K. M., & Gill, S. S. (2024). IoT based sensor network clustering for intelligent transportation system using meta-heuristic algorithm. Concurrency and Computation: Practice and Experience, 36, 8193.
Dilek, S., Irgan, K., Guzel, M., Ozdemir, S., Baydere, S., & Charnsripinyo, C. (2022). QoS‐aware IoT networks and protocols: A comprehensive survey. International Journal of Communication Systems. https://doi.org/10.1002/dac.5156
Winter, T., Ed., Thubert, P., Ed., Brandt, A., Hui, J., Kelsey, R., Levis, P., Pister, K., Struik, R., Vasseur, JP. and R. Alexander, "RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks", RFC 6550, March 2012. https://www.rfc-editor.org/info/rfc6550
Ahmadabadi, J. Z., Mood, S. E., & Souri, A. (2024). Star-Quake: A New operator in multi-objective gravitational search algorithm for task scheduling in IoT-based cloud-fog computing system. IEEE Transactions on Consumer Electronics, 70(1), 907–915. https://doi.org/10.1109/TCE.2023.3321708
Ebrahimi Mood, S., Ding, M., Lin, Z., & Javidi, M. M. (2021). Performance optimization of UAV-based IoT communications using a novel constrained gravitational search algorithm. Neural Computing and Applications., 33(22), 15557–68.
Mehmood, A., Khan, S., Shams, B., & Lloret, J. (2015). Energy-efficient multi-level and distance-aware clustering mechanism for WSNs. International Journal of Communication Systems., 28(5), 972–989. https://doi.org/10.1002/dac.2720
Ternero, J. A., Mayor, V., Estepa, R., Estepa, A., & Madinabeitia, G. (2023). Minimizing energy consumption in 802.15.4 IoT devices with multilevel xRPL (MxRPL). Internet of Things, 24, 100981. https://doi.org/10.1016/j.iot.2023.100981
Sobral, J. V. V., Rodrigues, J. J. P. C., Rabêlo, R. A. L., Saleem, K., & Kozlov, S. A. (2019). Improving the performance of loadng routing protocol in mobile iot scenarios. IEEE Access, 7, 107032–107046. https://doi.org/10.1109/access.2019.2932718
Okafor, K. C., Adebisi, B., & Anoh, K. (2023). Lightweight multi-hop routing protocol for resource optimisation in edge computing networks. Internet of Things., 22, 100758.
Belghachi, M., & Feham, M. (2015). QoS routing RPL for low power and lossy networks. Int. J. Distributed Sens. Netw., 1–10, 25.
Kaviani, F., & Soltanaghaei, M. (2022). CQARPL: Congestion and QoS-aware RPL for IoT applications under heavy traffic. The Journal of Supercomputing, 78(14), 16136–16166. https://doi.org/10.1007/s11227-022-04488-2
Pushpalatha, M., Anusha, T., Rao, T. R., & Venkataraman, R. (2021). L-RPL: RPL powered by laplacian energy for stable path selection during link failures in an Internet of Things network. Computer Networks, 184, 107697.
Saleem, A., Afzal, M. K., Ateeq, M., Kim, S. W., & Bin Zikria, Y. (2020). Intelligent learning automata-based objective function in RPL for IoT. Sustainable Cities and Society, 59, 102234.
P. J. Angeline.: Evolutionary Optimization Versus Particle Swarm Optimization: Philosophy and Performance Differences. Evolutionary Programming VII, Springer, Lecture Notes in Computer Science 1447 (1998) 601-610
Pawan, Y. N., & Kolla, B. P. (2020). Improved PSO performance using LSTM based inertia weight estimation. International Journal of Advanced Computer Science and Applications, 11, 11.
Mehbodniya, A., Webber, J., Rani, R., Ahmad, S., Wattar, I., Ali, L., & Nuagah, S. (2022). Energy-aware routing protocol with fuzzy logic in industrial internet of things with blockchain technology. Wireless Communications and Mobile Computing., 2022, 1–15. https://doi.org/10.1155/2022/7665931
Mamoun Qasem, Ahmed Al-Dubai, Imed Romdhani, Baraq Ghaleb and Wajeb Gharibi, "A new efficient objective function for routing in Internet of Things paradigm", in Proceedings of the 2016 IEEE Conference on Standards for Communications and Networking (CSCN), 31 October - 02 November 2016, Berlin, Germany, ISBN: 978–1–5090–3863–3, E-ISBN: 978–1–5090–3862–6, https://doi.org/10.1109/CSCN.2016.7785168, pp. 1–6, Published by IEEE, Available: https://ieeexplore.ieee.org/document/7785168
Bouaziz, M., Rachedi, A., Belghith, A., Berbineau, M., & Al-Ahmadi, S. (2019). EMA-Rpl: Energy and mobility aware routing for the internet of mobile things. Future Generation Computer Systems, 97(1), 247–258.
Lorente, G. G., Lemmens, B., Carlier, M., Braeken, A., & Steenhaut, K. (2017). BMRF: bidirectional multicast RPL forwarding. Ad Hoc Networks., 1(54), 69–84.
G. Oikonomou, I. Phillips, Stateless multicast forwarding with RPL in 6LowPAN sensor networks, in: Pervasive Computing and Communications Workshops (PERCOM Workshops), 2012 IEEE International Conference on, 2012, pp. 272–277.
Hadaya, N. N., & Alabady, S. A. (2021). Improved RPL protocol for low-power and lossy network for IoT environment. SN Computer Science. https://doi.org/10.1007/s42979-021-00742-1
Sebastian, A., & Sivagurunathan, S. (2018). Load balancing metric based routing protocol for low power and lossy networks (lbRPL). International Journal of Engineering and Technology(UAE), 7, 39.
Ghaleb, Baraq & Al-Dubai, Ahmed & Ekonomou, Elias & Gharibi, Wajeb & Mackenzie, Lewis & Bani Khalaf, Mustafa. (2018). A New Load-Balancing Aware Objective Function for RPL's IoT Networks. 2018 IEEE 20th International Conference on High Performance Computing and Communications; IEEE 16th International Conference on Smart City; IEEE 4th International Conference on Data Science and Systems (HPCC/SmartCity/DSS) https://doi.org/10.1109/HPCC/SmartCity/DSS.2018.00151.
Singh, P., & Chen, Y. C. (2019). RPL enhancement for a parent selection mechanism and an efficient objective function. IEEE Sensors Journal, 19(21), 10054–10066. https://doi.org/10.1109/JSEN.2019.2927498
Subramani, P. S., & Bojan, S. (2023). Weighted sum metrics—based load balancing RPL objective function for IoT. Annals of Emerging Technologies in Computing, 7(2), 35–55. https://doi.org/10.33166/AETiC.2023.02.004
Alilou, M., Babazadeh Sangar, A., Majidzadeh, K., & Masdari, M. (2024). QFS-RPL: Mobility and energy aware multi path routing protocol for the internet of mobile things data transfer infrastructures. Telecommunication Systems, 85, 289–312.
Joseph Charles, A. S., & Kalavathi, P. (2022). A reliable link quality-based RPL routing for internet of things. Soft Computing, 26(1), 123–135. https://doi.org/10.1007/s00500-021-06443-4
Rabet, I., Fotouhi, H., Alves, M., Vahabi, M., & Björkman, M. (2024). ACTOR: Adaptive control of transmission power in RPL. Sensors., 24, 2330. https://doi.org/10.3390/s24072330
Goyal, S., & Chand, T. (2018). Improved trickle algorithm for routing protocol for low power and lossy networks. IEEE Sensors Journal, 18(5), 2178–2183. https://doi.org/10.1109/JSEN.2017.2787584
Lamaazi, H., Benamar, N., el Kahili, N., et al. (2019). IEEE wireless communications and networking conference (WCNC). Marrakesh, Morocco, 2019, 1–6. https://doi.org/10.1109/WCNC.2019.8886028
Joseph Charles, A. S., & Palanisamy, K. (2019). Attunement of trickle algorithm for optimum reliability of RPL over IoT. In Sabu M. Thampi, Sanjay Madria, Guojun Wang, Danda B. Rawat, Jose M. Alcaraz, & Calero, (Eds.), Security in Computing and Communications: 6th International Symposium, SSCC 2018, Bangalore, India, September 19–22, 2018, Revised Selected Papers (pp. 628–639). Singapore: Springer Singapore. https://doi.org/10.1007/978-981-13-5826-5_49
Fotouhi, H., Moreira, D., & Alves, M. (2015). mRPL: Boosting mobility in the Internet of Things. Ad Hoc Networks, 26, 17–35. https://doi.org/10.1016/j.adhoc.2014.10.009
C. Vallati and E. Mingozzi, “Trickle-F: Fair broadcast suppression to improve energy-efficient route formation with the RPL routing protocol,” presented at the Sustain. Internet ICT Sustain. (SustainIT), 2013, pp. 1–9. Available: http://ieeexplore.ieee.org/
B. Ghaleb, A. Al-dubai, E. Ekonomou, B. Paechter, and M. Qasem, “Trickle-Plus : Elastic Trickle Algorithm for Low- Power Networks and Internet of Things , Trickle-Plus : Elastic Trickle Algorithm for Low- Power Networks and Internet of Things,” Wirel. Commun. Netw. Conf. (WCNC), 2016 IEEE, no. April, 2016.
P. Thubert, "Objective function zero for the routing protocol for low-power and lossy networks (RPL)", RFC 6552, https://doi.org/10.17487/RFC6552, March 2012, https://www.rfc-editor.org/info/rfc6552. 34] Gnawali O., Levis P. The Minimum Rank with Hysteresis Objective Function. Internet Engineering Task Force (IETF); Fremont, CA, USA: 2012.
Gnawali O., Levis P. The minimum rank with hysteresis objective function. internet engineering task force (IETF); Fremont, CA, USA: 2012.
Gad, A. G. (2022). Particle swarm optimization algorithm and its applications: A systematic review. Arch Computat Methods Eng, 29, 2531–2561. https://doi.org/10.1007/s11831-021-09694-4
Guo, X., Guo, Z. C., & Shi, L. (2023). Capacity dependent analysis for functional online learning algorithms. Applied and Computational Harmonic Analysis., 1(67), 101567.
Wang, F., Babulak, E., & Tang, Y. (2020). SL-RPL: stability-aware load balancing for RPL. International Journal Transaction on Machine Learning and Data Mining., 2020(1), 27–39.
Qasem, M., Al-Dubai, A., Romdhani, I., et al.: ‘Load balancing objective function in RPL’, ROLL—WGINTERNET DRAFT, 2017
P. Levis, T. H. Clausen, O. Gnawali, J. Hui and J. Ko, The Trickle Algorithm, RFC 6206, https://doi.org/10.17487/RFC6206, March 2011, https://www.rfc-editor.org/info/rfc6206
Thomson, C., Romdhani, I., Al-Dubai, A., Qasem, M., Ghaleb, B., & Wadhaj, I. (2016). Cooja Simulator Manual. Edinburgh Napier University.
Funding
This work has been funded by the "Ministerio de Economía y Competitividad" through the Project TED2021-131040B-C31.
Author information
Authors and Affiliations
Contributions
S.M. and M.B.; Methodology, T.S. and R.A.; Validation, J.L. and R.A.; Investigation, S.M.; Data Curation, S.M., M.B. and T.S.; Writing—Original Draft Preparation, J.L. and R.A.; Writing—Review & Editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mokrani, S., Belkadi, M., Sadoun, T. et al. LEA-RPL: lightweight energy-aware RPL protocol for internet of things based on particle swarm optimization. Telecommun Syst 88, 14 (2025). https://doi.org/10.1007/s11235-024-01254-y
Accepted:
Published:
DOI: https://doi.org/10.1007/s11235-024-01254-y