
Abstract
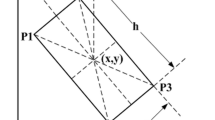
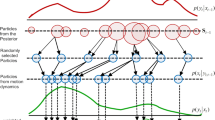
This paper addresses the issue of tracking a single visual object through crowded scenarios, where a target object may be intersected or partially occluded by other objects for a long duration, experience severe deformation and pose changes, and different motion speed in cluttered background. A robust visual object tracking scheme is proposed that exploits the dynamics of object shape and appearance similarity. The method uses a particle filter where a multi-mode anisotropic mean shift is embedded to improve the initial particles. Comparing with the conventional particle filter and mean shift-based tracking (Shan et al. 2004), our method offers the following novelties: We employ a fully tunable rectangular bounding box described by five parameters (2D central location, width, height, and orientation) and full functionaries in the joint tracking scheme; We derive the equations for the multi-mode version of the anisotropic mean shift where the rectangular bounding box is partitioned into concentric areas, allowing better tracking objects with multiple modes. The bounding box parameters are then computed by using eigen-decomposition of mean shift estimates and weighted averaging. This enables a more efficient re-distributions of initial particles towards locations associated with large weights, hence an efficient particle filter tracking using a very small number of particles (N = 15 is used). Experiments have been conducted on video containing a range of complex scenarios, where tracking results are further evaluated by using two objective criteria and compared with two existing tracking methods. Our results have shown that the propose method is robust in terms of tracking drift, tightness and accuracy of tracked bounding boxes, especially in scenarios where the target object contains long-term partial occlusions, intersections, severe deformation, pose changes, or cluttered background with similar color distributions.














Similar content being viewed by others
References
Shan, C., Wei, Y., Tan, T., & Ojardias, F. (2004). Real time hand tracking by combining particle filtering and mean shift. In Proc. ieee int. conf. automatic face and gesture recognition (pp. 669–674).
Comaniciu, D., Ramesh, V., & Meer, P. (2003). Kernel-based object tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence, 5, 564–577.
Wang, T., Gu, I. Y. H., & Shi, P. (2007). Object tracking using incremental 2D-PCA learning and Ml Eestimation. In Proc. IEEE int. conf. acoustics, speech and signal processing.
Wang, T., Gu, I. Y. H., Backhouse, A., & Shi, P. (2008). Face tracking using Rao-Blackwellized particle filter and pose-dependent probabilistic PCA. In Proc. IEEE int. conf. image processing (pp. 853–856).
Toyama, K., Krumm, J., Brumitt, B., & Meyers, B. (1999). Wallflower: Principles and practice of background maintenance. In Proc. IEEE int. conf. computer vision (pp. 255–261).
Gavrila, D.(1999). The visual analysis of human movement: A survey. Computer Vision and Image Understanding, 73(1), 82–98.
Li, L., Huang, W., Gu, I. Y. H., & Tian, Q. (2004). Statistical modeling of complex background for foreground object detection. IEEE Transactions on Image Processing, 13(11), 1459–1472.
Welch, G., & Bishop, G. (1997). Scaat: Incremental tracking with incomplete information. In Proc. int. conf. computer graphics and interactive techniques.
Shi, J., & Tomasi, C. (1994). Good features to track. In Proc. IEEE computer society conf. comp. vision and pattern recognition (pp. 593–600).
Gordon, N. J., Doucet, A., & Freitas, N. D. (2000). On sequential monte carlo sampling methods for bayesian filtering. Statistics and Computing, 10, 197–208.
Rosales, R., & Sclaroff S. (1999). 3D trajectory recovery for tracking multiple objects and trajectory guided recognition of actions. In Proc. IEEE computer society conf. computer vision and pattern recognition (pp. 117–123).
Doucet, A., Freitas, N. D., & Gordon, N. (2001). Sequential Monte Carlo methods in practice. New York: Springer.
Bar-Shalom, Y., & Fortmann, T. (1988). Tracking and data association. New York: Academic.
Reid, D. B. (1979). An algorithm for tracking multiple targets. IEEE Transactions on Automatic Control, 24(2), 843–854.
Vermaak, J., Doucet, A., & Perez, P. (2003). Maintaining multimodality through mixture tracking. In Proc. int. conf. computer vision (pp. 1110–1116).
Okuma, K., Taleghani, A., Freitas, N., Little, J. J., & Lowe, D. G. (2004). A boosted particle filter: Multitarget detection and tracking. In Proc. european conf. computer. vision (pp. 28–39).
Li, L., Huang, W., Gu, I. Y. H., Luo, R., & Tian, Q. (2008). An efficient sequential approach to tracking multiple objects through crowds for real-time intelligent CCTV systems. IEEE Transactions on Systems, Man and Cybernetics. Part B., 23(1), 13–23.
Collins, R. T. (2003). Mean-shift blob tracking through scale space. In Proc. IEEE comp. society conf. computer vision and pattern recognition (Vol. 2, pp. 234–240).
Bretzner, L., & Lindeberg, T. (1998). Feature tracking with automatic selection of spatial scales. In Proc. comp. vision and image understanding (Vol. 71, pp. 385–392).
Yilmaz, A. (2007). Object tracking by asymmetric kernel mean shift with automatic scale and orientation selection. In Proc. IEEE int. conf. computer vision and pattern recognition (pp. 1–6).
Sumin, Q., & Xianwu, H. (2008). Hand tracking and gesture gecogniton by anisotropic kernel mean shift. In Proc. IEEE int. conf. neural networks and signal processing (Vol. 25, pp. 581–585).
Birchfield, S. T., & Rangarajan, S. (2005). Spatiograms versus histograms for region-based tracking. In Proc. IEEE int. conf. computer vision pattern recognition (pp. 71158–1163).
Elgammal, A., Duraiswami, R., & Davis, L. S. (2003). Probabilistic tracking in joint feature-spatial spaces. In Proc. IEEE int. conf. computer vision pattern recognition (Vol. 1, pp. I-781–I-788).
Xu, D., Wang, Y., & An, J. (2005). Applying a new spatial color histogram in mean-shift based tracking algorithm. In Proc. image and vision comp. conf. New Zealand.
Maggio, E., & Cavallaro, A. (2005). Multi-part target representation for colortracking. In Proc. IEEE int. conf. image processing (pp. 729–732).
Parameswaran, V., Ramesh, V., & Zoghlami, I. (2006). Tunable kernels for racking. In Proc. IEEE computer society conf. on comp. vision and pattern recognition (pp. 2179–2186).
Isard, M., & Blake, A. (1998). CONDENSATION - conditional density propagation for visual tracking. International Journal of Computer Vision, 29(1), 5–28.
Wang, T., Backhouse, A., & Gu, I. Y. H. (2008). Online subspace learning in Grassmann manifold for moving object tracking in video. In Proc. IEEE int. conf. acoustics, speech and signal processing.
Michael, K. P., & Shephard, N. (1999). Filtering via simulation: Auxiliary particle filters. Journal of the American Statistical Association, 94(446), 590–599.
Shen, C., Hengel, A. V. D., & Brooks, M. J. (2004). Enhanced importance sampling: Unscented auxiliary particle filtering for visual tracking. In Proc. Australian Conference on Artificial Intelligence (pp. 180–191).
Maggio, E., & Cavallaro, A. (2005). Hybrid particle filter and mean shift tracker with adaptive transition model. In proc. IEEE int. conf. acoustics, speech, and signal processing (Vol. 2, pp. 221–224).
Huang Y., & Llach, J. (2007). Variable number of “Informative” particles for object tracking. In Proc. IEEE int. conf. on multimedia and expo (pp. 1926–1929).
Bradski, G. R. (1998). Real time face and object tracking as a component of a perceptual user interface. In Proc. IEEE workshop on application of computer vision (pp. 214–219).
Fox, D. (2001). KLD-sampling: Adaptive particle filters. In Proc. advances in neural information processing systems (pp. 713–720).
Backhouse, A. G., Khan, Z. H., & Gu, I. Y. H. (2009). Robust object tracking using particle filters and multi-region mean shift. Springer Lecture Notes in Computer Science (LNCS) (Vol. 5879). Advances in Multimedia Information Processing, PCM.
Chen, Z. (2003). Bayesian filtering: From Kalman filters to particle filters, and beyond. Adaptive Syst. Lab., McMaster Univ., Hamilton, ON, Canada. available at: http://soma.crl.mcmaster.ca/ zhechen/homepage.htm.
Khan, Z. H., Gu, I. Y. H., Wang, T., & Backhouse, A. (2009). Joint anisotropic mean shift and consensus point feature correspondences for object tracking in video. In Proc. IEEE int. conf. multimedia and expo (pp. 1270–1273).
Khan, Z. H., & Gu, I. Y. H. (2010). Joint feature correspondences and appearance similarity for robust visual object tracking. In IEEE Transactions on information forensics and security (Vol. 5, No. 3).
Acknowledgements
This work was partially supported by National Engineering and Scientific Commission (NESCOM) in Pakistan, and Chalmers University of Technology in Sweden.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Khan, Z.H., Gu, I.YH. & Backhouse, A.G. A Robust Particle Filter-Based Method for Tracking Single Visual Object Through Complex Scenes Using Dynamical Object Shape and Appearance Similarity. J Sign Process Syst 65, 63–79 (2011). https://doi.org/10.1007/s11265-010-0539-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11265-010-0539-9