
Abstract
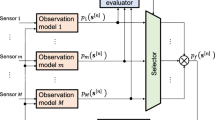
This paper presents a probabilistic approach for sensor-based localization with weak sensor data. Wireless received signal strength measurements are used to disambiguate sonar measurements in symmetric environments. Particle filters are used to model the multi-hypothesis estimation problem. Experiments indicate that multiple weak cues can provide robust position estimates and that multiple sensors also aid in solving the kidnapped robot problem.
Similar content being viewed by others

References
Blaer P, Allen PK (2003) TopBot: Automated network topology detection with a mobile robot. In: IEEE international conference on robotics and automation, Taipei, Taiwan
Choset H, Pignon P (1997) Coverage path planning: The boustrophedon cellular decomposition. In: International Conference on Field and Service Robotics, Canberra, Australia
Elnahrawy E, Li X, Martin RP (2004) The limits of localization using signal strength: A comparative study. In: IEEE Communications society conference on sensor and Ad Hoc communications and networks, Santa Clara, CA, USA
Fox D, Burgard W, Dellaert F, Thrun S (1999) Monte Carlo localization: Efficient position estimation for mobile robots. In: Proceedings of national conference on artificial intelligence, Orlando, FL, USA
Fox D, Thrun S, Burgard W, Dellaert F (2000) Particle filters for mobile robot localization. In: Sequential Monte Carlo methods in practice, Springer
Hii P, Zaslavsky A (2005) Improving location accuracy by combining wlan positioning and sensor technology. In: Workshop on Real-world wireless sensor networks, Stockholm, Sweden
Isard M, Blake A (1998) CONDENSATION—conditional density propagation for visual tracking. Int J Comput Vis 29(1): 5–28
Kaemarungsi K, Krishnamurthy P (2004) Properties of indoor received signal strength for wlan location fingerprinting. In: First annual international conference on mobile and ubiquitous systems: networking and services, Boston, MA, USA, pp 14–23
Kontkanen P, Myllymäki P, Roos T, Tirri H, Valtonen K, Wettig H (2004) Topics in probabilistic location estimation in wireless networks. In: Proceedings of 15th IEEE International Symposium on Personal, Indoor, and Mobile Radio Communications, Barcelona, Spain
Ladd AM, Bekris KE, Rudys AP, Wallach DS, Kavraki LE (2004) On the feasibility of using wireless ethernet for indoor localization. IEEE Trans Rob Autom 20(3):555–559
Montemerlo M, Thrun S, Koller D, Wegbreit B (2002) FastSLAM: A factored solution to the simultaneous localization and mapping problem. In: Proceedings of the AAAI National Conference on Artificial Intelligence, Edmonton, Canada
Thrun S, Burgard W, Fox D (2005) Probabilistic Robotics. MIT Press, Cambridge
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Laaksonen, J., Kyrki, V. Localization in ambiguous environments using multiple weak cues. Intel Serv Robotics 1, 281–288 (2008). https://doi.org/10.1007/s11370-008-0023-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-008-0023-6